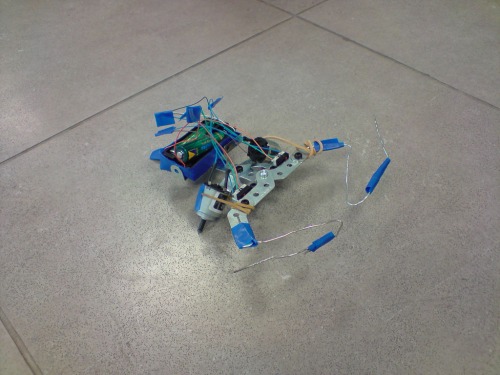
Hi everybody, this is my first entry here! First entry for my first robot, so let me proudly introduce you my junkbot :
I found the instructions on Make Magazine and started to look for the components... I got the switches in an old computer mouse, the motors from a friend, some Meccano, a battery holder from a broken remote-control, two paperclips, some electrical tape, et voilà!
He's not very intelligent, but he was pretty fun to build, and most of all he gave me the need to do more! So now i can't wait to build the famous "StartHere", i just have to order the components and you'll see me again soon... (i hope!)
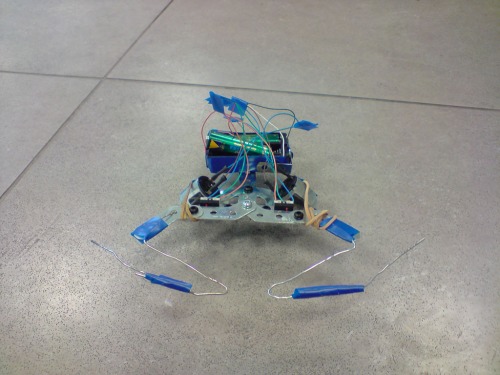
Actuators / output devices: 2 small motors
Power source: 2 x 1.5V (AA)
Sensors / input devices: 2 Bumper switches from a computer mouse
I’m really glad you guys like it, actually, given all the amazing robots i saw on LMR, i was kind of affraid you find it too simple to be interesting…
I’m right now working on another robot, still quite simple, but what i really want now is start coding some behaviours! The fact is, i code for a living (and i love it), and i already tried to program behaviours in the Microsoft Terrarium project (in which you program virtual insects, and then see how they survive in the terrarium when confronted with others insects) (more info here : http://weblogs.asp.net/bsimser/archive/2008/07/16/reintroducing-terrarium-now-with-2-0-goodness.aspx )
But there are a lot of differences between virtual insects and real robots!
You need not be worried about the prestige of your creation here on LMR. Besides it looks pretty in the pictures. The blue tape really gives it a sense of design.
It behaves interestingly as well. I think the video saved you from LMR shame!
I like it! Small, fast, and simple! Nice touch using the blue tape! We all have had to start somewhere. The "simple" bots are the ones that often give me the most inspiration. Hope to see more soon…
Basically, there are two batteries but the motors only use one at the time, and when one of the switches is activated, the motor on the other side uses the other battery which is connected the opposit way of the first one, so the motor goes backward. Don’t know if i’m clear, so just check the pdf