

First of all, I must give credit where credit is due. The ERP is NOT my design, but is an Experimental Robot Platform, designed by John Palmisano of Society of Robots.
I am not a designer, or an inventive person, so as he has made this project open source, I am making a copy. I also think that posting this project on LMR, as well, will give lots of members who have not seen this elsewhere some ideas and maybe inspiration. (Especially the youngsters).
I started in this hobby about 6 months ago, and have built various different simple robots - photovore, line follower, object avoider etc, and always seem to have to build a new chassis from the ground up. So I have decided that I need a platform which can be adapted to all sorts of different "experiments", not least video object recognition.
Having read all about the ERP through it's development, it made sense to me to use this design, which is tried and tested, and make my own ERP. I don't have the luxury of CNC or machine tools etc, so it will all have to be done using hacksaw and dremel.
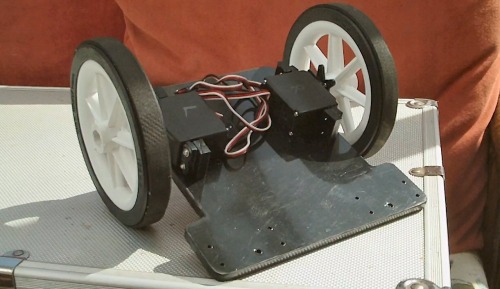
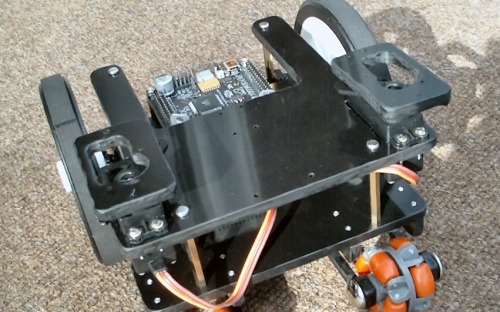
I have bought a small offcut sheet of 6mm HDPE, and will be using this for all the main components of the chassis. I have made the main chassis, and have fitted 2 continuous rotation servos to it so far, together with a couple of wheels from a child's truck.
We'll see how it goes. The main picture shows my progress so far.
UPDATE 08/04/11
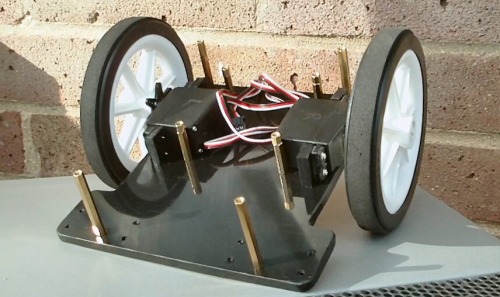
I managed to find enough standoffs of approximately the right length, in my "treasure chest" (shed).
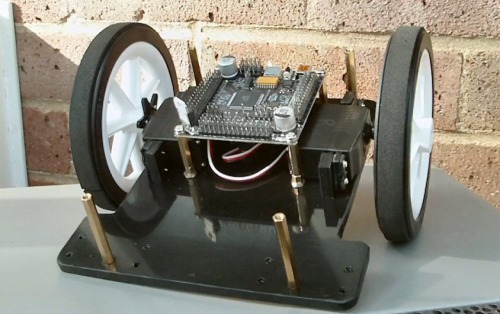
Initially, I'll be using the AxonII controller for brains, but I have elongated the mounting holes on the base so it will accept various different types. I must say, I'm more comfortable with Basic, like the picaxe, and find C quite intimidating, but will persevere.
UPDATE 10/04/11
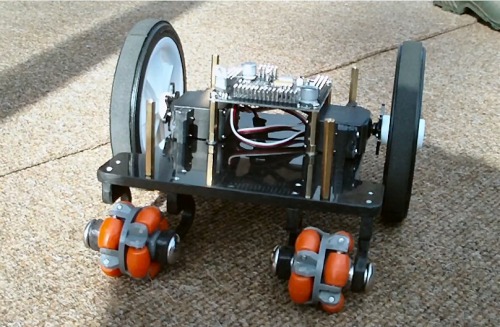
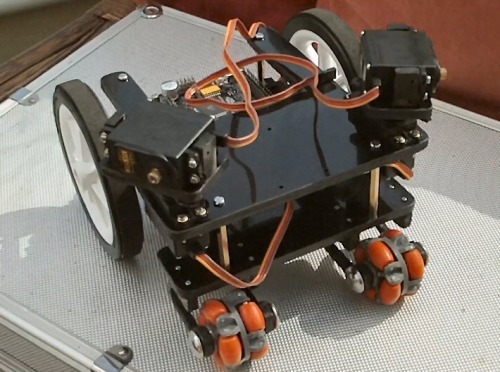
After a bit of a struggle, I have managed to cut out the front suspension/wheel supports. There is no way I would have been able to make the axles out of HDPE, but I found some 8mm aluminium tube in my shed. The chrome hubs are in fact left over from when I used to repair prams and buggies (20 odd years ago - I don't throw anything away) :D

UPDATE 11/04/11
Yesterday, I cut out the 2nd tier, and the mounting blocks for the 2nd set of shoulder servos. Assembled them this morning.
The bad news is I've got to cut out the arms, now. That'll take a while ;)

UPDATE 13/04/11
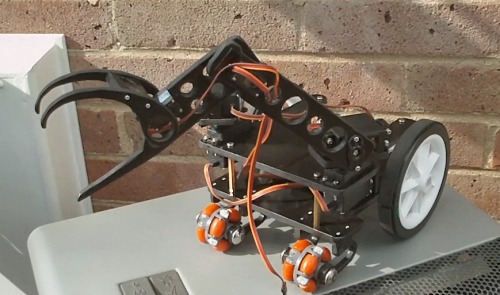
I've cut and mounted the lower halves of the arms, with the elbow servos, and am in the process of making the rest of the claws now.
I also thought I had better make sure it actually moves, before going too much further.
I used an RC controller, so the servos don't have as much movement as they will have when connected to the brains. It'll probably be quicker, too :) Also, it showed me that the shoulder servos need re-positioning on the splines. (Video added)

UPDATE 17/04/11
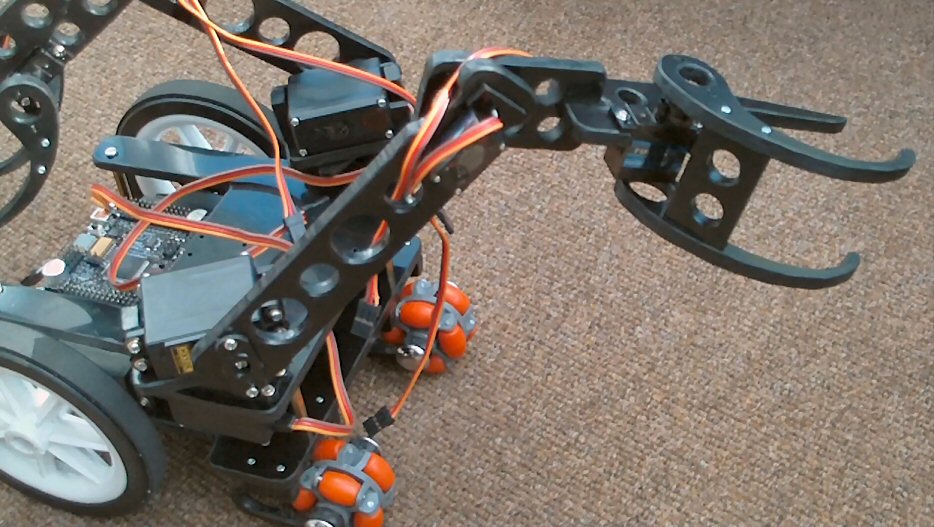
Despite being very busy at the moment, I have managed to find time to finish the arms and claws.
Probably my next step will be to programme the AxonII so ERP can just drive around and show off the claws. Not sure yet about sensors and stuff, as I am a little short of funds at the present :(
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/my-erp


