I renewed my old robot. I upgraded its software in order to act more reasonably.
I detached compas, odometer and fix-distance IR sensors. They were unnecessary to find the target and bring it home.
Target is found by laser-finder in combination with ultrasound. Orientation of robot is now "memorised" from previous maneuvres. This is not very precise, but for short tasks like this it is sufficient.
Also I finetuned the gripper sensors which are "mission critical" on order to see if the target is really "in-front" and "in-between" the jaws. Before it happens that robot only sticked into the targe without catching it. Now, based on signals from jaw tip sensors it centers the position and tries to catch the target at low-center position.
What I did not solve perfectly is the way back. Way forward is divided into three separate pieces. To calculate how to go back home I used too simple algorithm. The preciseness of final home position is worse than +/- 10 cms.
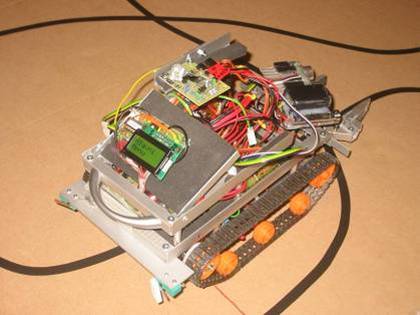
I will post a video when the robot will look nicer. Now the third Picaxe is still on breadboard placed on top (not shown on the pictures). It does not allow to show all the functionality at the same moment.
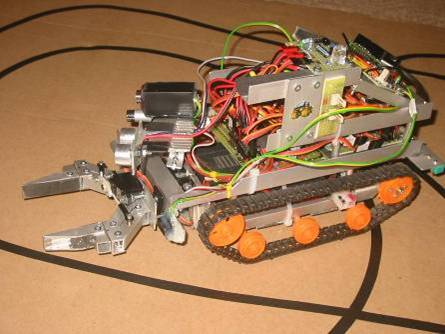
Yes they are homemade. I used aluminium profiles (available at hobbyshops) square shape 10x10 mm for parallelogram and U-shaped 12x10 for jaws and mount. The squared pieces fits perfectly inside the U-shaped ones which simplifies the construction and makes it very strong.
The main power of jaws depends on the servo used. I expect to manipulate with light objects so i used only micro servo but with metalic gears to prevent their damage in case of unpredictable moves.
Very nice job! I like your metal construction. It’s really nice to meet someone from the Czech republic there - I thought I know a lot of mobile robotics enthusiasts living in our republic
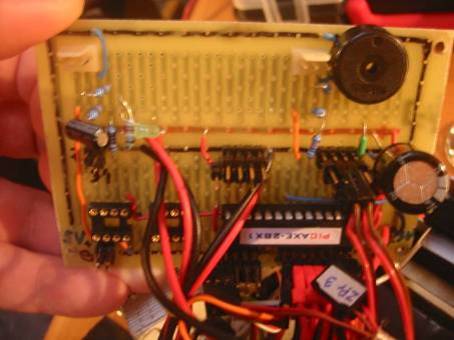
Could you please add a video?I am interested in tank based line followers since I know what probles the tank based system brings. Why have you decided to use three microcontrollers for one mobile robot? Wouldn’t it be better to use one “bigger” MCU?
EDIT: One more question: How did you make the odometer?
Very nice, i like the fact Very nice, i like the fact that you started small and then add few stuff, and then add again, and then add again… until you have a first robot that you can be very proud of!
I added first linefollowing wideos. See attachments. Quality is really bad because my DV camera said good-bye. I made clips using old Canon Ixus. it is in two parts.
I prepared training ground with not only simple lines, but with some confusing obstacles:
Nice videos, thank you. And how did you make the odometers?
You have good base for robot that follows line and avoids obstacles - do you plan to take a part in IST Robot, a robot competition in Bratislava (www.robotika.sk)? Maybe we’ll meet there.
After several attempts I decided to use mouse scrollwheel with mechanical encoder. It gives only two pulses per cm which allows to count them easilly. I use only one odometer for the distance. Direction is measured by compas. Software is still under development.
As a motors I use tvo Hitec 422 servos. I took away the feedback potentiometers to allow it to run continuously. I then mounted other small potentionmeters on the servo casing. They are used as "zero" setting to trim the full stop without jitters.
Everything is powered from one 12V lead battery. Motors have separate 5V 2A stabiliser. This prevents to create electric noise on the other circuits.
Nice job with the aluminium It shows you have model building experience. Welcome to the robot world. They go well togather. I am impressed with the grabber for sure. As far as the servos I also did that with some super servos to get more touque at a reasionable price. Check out my mini monster boe bot. Like yours, it started simple and kept getting bigger. I later tried that process with some cheap futaba servo but had no success, so I convertted them to simple DC by just running out the motor wires after cutting the foil. They are now on my next creation not finished yet using a dual H bridge.