



Multifunctional Tank 01
Hi all,
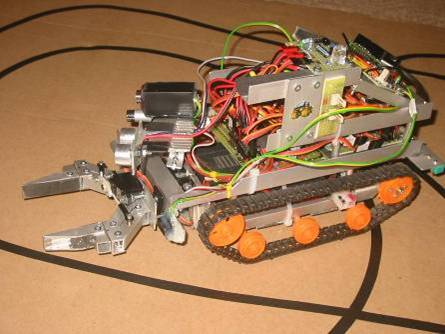
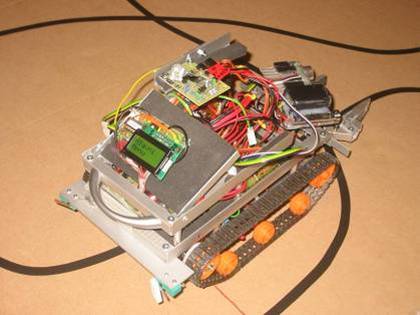
I renewed my old robot. I upgraded its software in order to act more reasonably.
I detached compas, odometer and fix-distance IR sensors. They were unnecessary to find the target and bring it home.
Target is found by laser-finder in combination with ultrasound. Orientation of robot is now "memorised" from previous maneuvres. This is not very precise, but for short tasks like this it is sufficient.
Also I finetuned the gripper sensors which are "mission critical" on order to see if the target is really "in-front" and "in-between" the jaws. Before it happens that robot only sticked into the targe without catching it. Now, based on signals from jaw tip sensors it centers the position and tries to catch the target at low-center position.
What I did not solve perfectly is the way back. Way forward is divided into three separate pieces. To calculate how to go back home I used too simple algorithm. The preciseness of final home position is worse than +/- 10 cms.



Tank 01 revival - The best home videos are here
TV remote, Follows line, search the target, move objects
- Actuators / output devices: Hitec 422 as motors, 2x servo clamp, 2x servo head
- Control method: Autonomous or TV remote
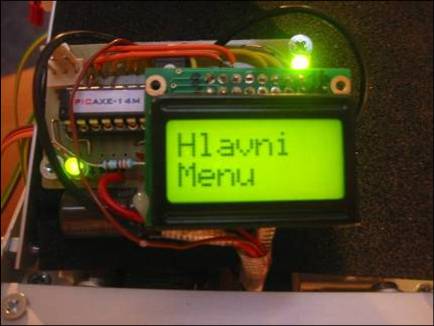
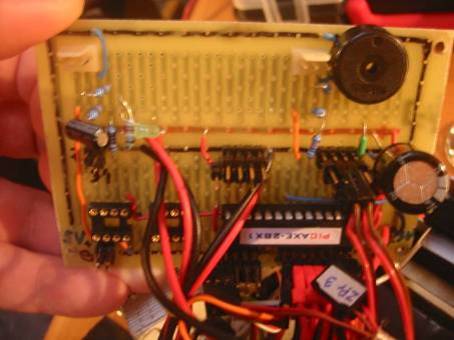
- CPU: Picaxe 14m, 2x Picaxe 28X1
- Power source: Lead 12V 0, 8 Ah
- Programming language: Basic
- Sensors / input devices: laserfinder, Linefollower IR SRF05
- Target environment: indoor