

- First of all, Appolgies for the crappy pictures, I will be updating them with better ones, more info, and maybe some video.
I decided to build a robot that could navigate around the house, know it's location, pickup items, (bottles, cans ect) and move them to another location. Although I still have some bugs to fix, it mostly works.
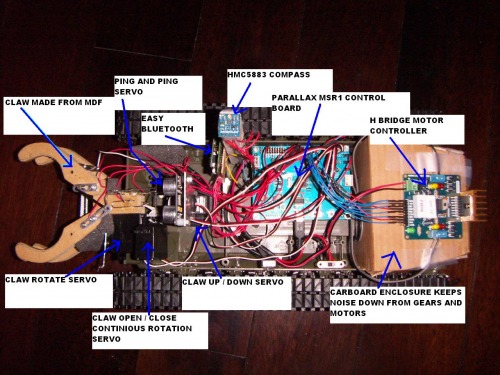
The chassis is and RC tank made by Heng-Long, about $75. A good platform to start with, and lots motors and gearboxes for future projects, (and an airsoft pellet gun, woohoo).
Many thanks go to the inventor of HOT GLUE !!
JUST ADDED - VIDEO, Sorry the start is so dark, dark hardwood floors make for crappy video.
Here's what Mr Get-a-beer does in the video.
1. Uses ping to get the distance from two perpendicular walls, and sets it X,Y cordinates for navigation purposes. (not in video)
2. Goes to a preset location, uses ping to search for the closest object, and moves close to that object.
3. Scans with ping again to find the center of that object, opens the claw, moves in and grabs it.
4. Rotate the object (can) out of view of the ping sensor.
5. Navigate to the trash can in the kitchen, stopping at preset waypoints, correcting the coordinates using distances from walls measured by the ping sensor. The compass is used to maintain the heading, and wheel encoders measure distance travelled. Once at a waypoint, it updates the X,Y coordinates using trig functions. These waypoints are all entered into the program code.
6. Drop the object (can) at the trash bin, and return to my office for further instructions.
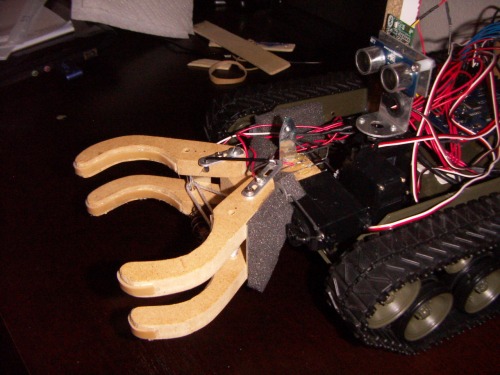
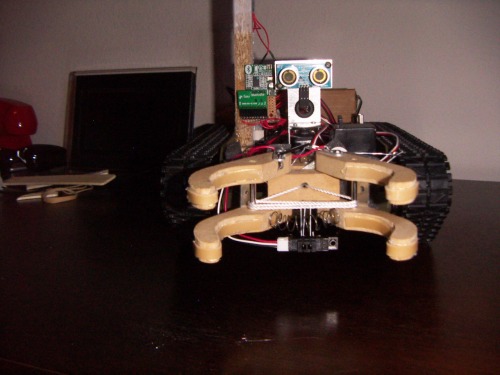
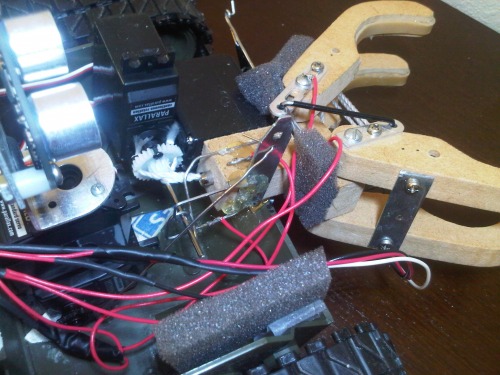
The foam attached to the claw is to stop the ping from "seeing" the claw and giving useless distance information.

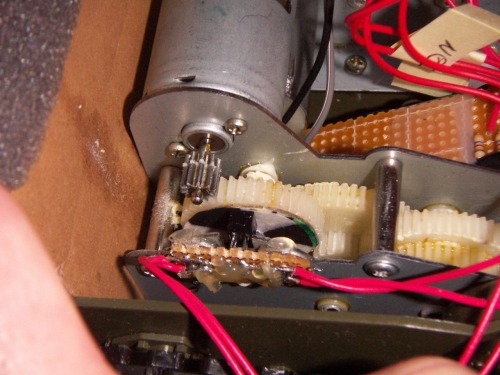
Wheel encoders are home-built using QRD1114 emitter / detector pairs, and a few resitors and caps. They are mounted inside the gearbox and give very good accuracy down to 1mm of robot travel.
View of the gripper, uses twine and a pully type system to get a firm grip on things.
Future Plans for the bot :
1.Speed it up a bit (easy done)
2. Add voice control. I already have the say-it module from Parallax, I just need to tweak it to work with the propellor, since it is designed mostly for the basic stamp2.
3. Add another microcontroller and motors to my beer fridge, so MR Get-a-beer can instruct the fridge to open using IR commands. (it's only a mini fridge, sitting on the floor). Grab a beer from the fridge, and bring to wherever is needed.
4. A possible upgrade to a 5 DOF arm to replace the crude gripper. This might require moving everything to a bigger platform.
UPDATE - Added video. Mr Get-a-beer cannow actually get a beer out of my mini-fridge. Finally it does something usefull. I had to split the video into two parts to get it off my phone.
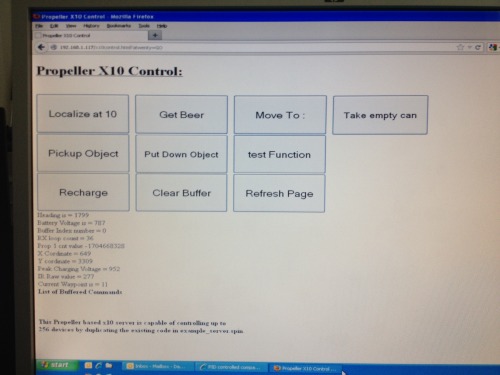
UPDATE 8/11/2012 - just added a video if Mr get-a-beer going to the docking station for a recharge. I also added a pic of the html page that I now use to give commands to the bot. I can now dial-a-beer from my couch using my iphone or any web enabled device.
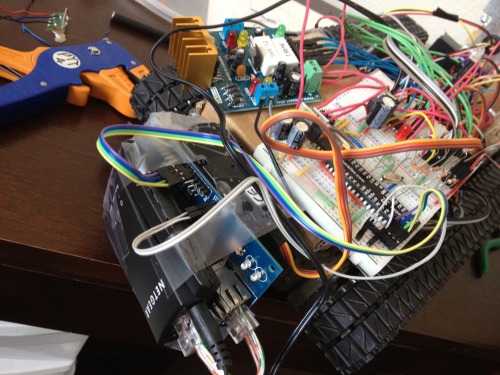
Used used gadget gangsters E- net module and a netgear wireless adapter, there is no pc invovolved, the webpages are served directly off the robot, and connections are made through my home wireless network, i'm now using a second propeller chip which shares infomation with the primary motion control propeller.
Also added pics showing recharging dock, with coax cable, and simple tin foil used as the connection.
Pics of the e-net module, netgeat wireless adapter and second propeller chip onthe beadboard all crammed on the back of the bot. ( Time for a bigger robot I think)

Gets me beer from the fridge, and delivers it to my location, will also take empty cans to the bin.
- Actuators / output devices: DC Motors, plus multiple servos, IR transmitter
- Control method: autonomous
- CPU: 80Mhz 8-Core Parallax Propeller
- Power source: 7.2v RC pack
- Programming language: Spin
- Sensors / input devices: encoders, compass, PING, easy bluetooth module
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/mr-get-a-beer
 And A Plus For The Coors Light Can, I’m Drinking One Now!
And A Plus For The Coors Light Can, I’m Drinking One Now!