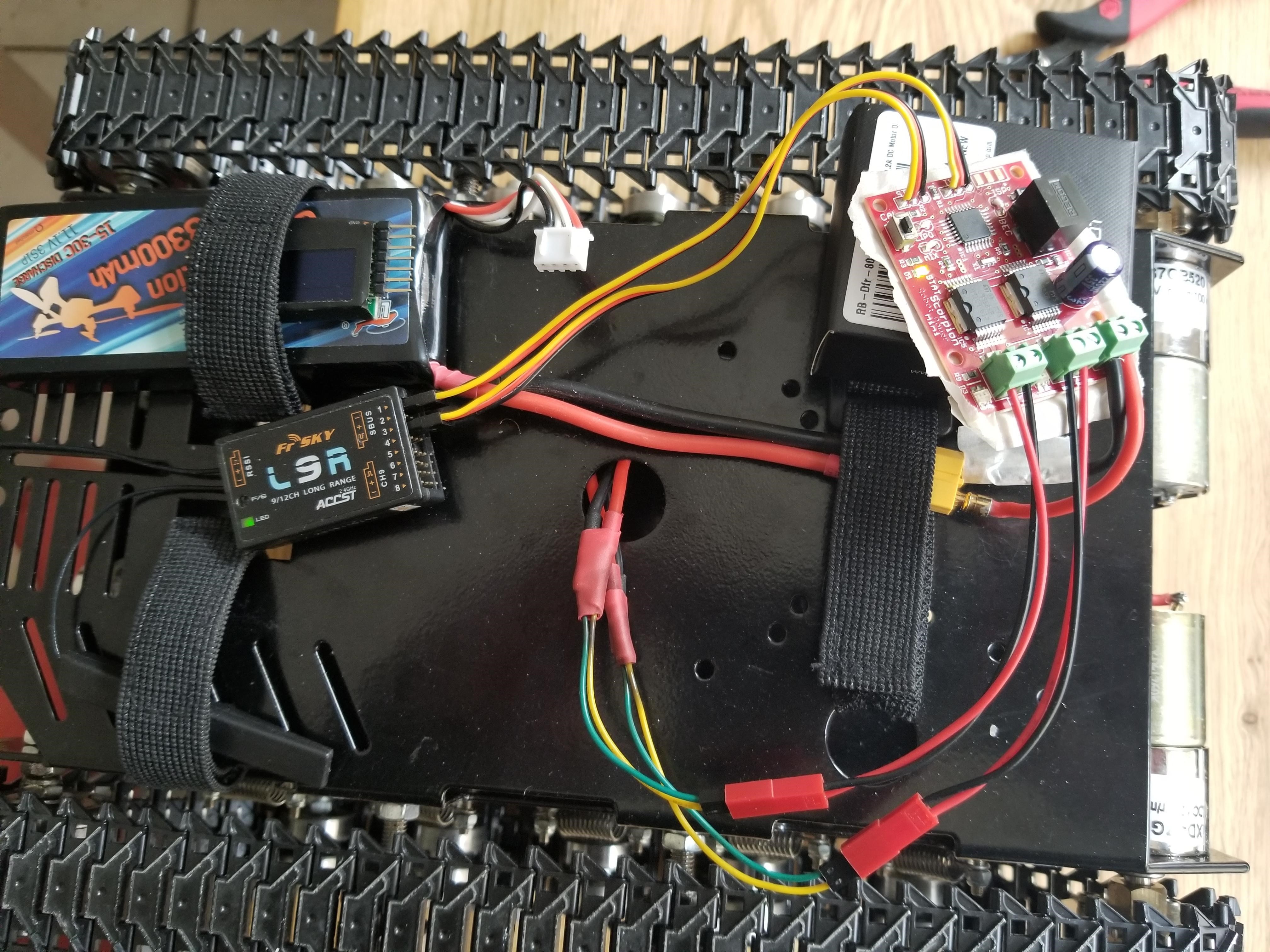
Scorpion and RC attached, System is working.
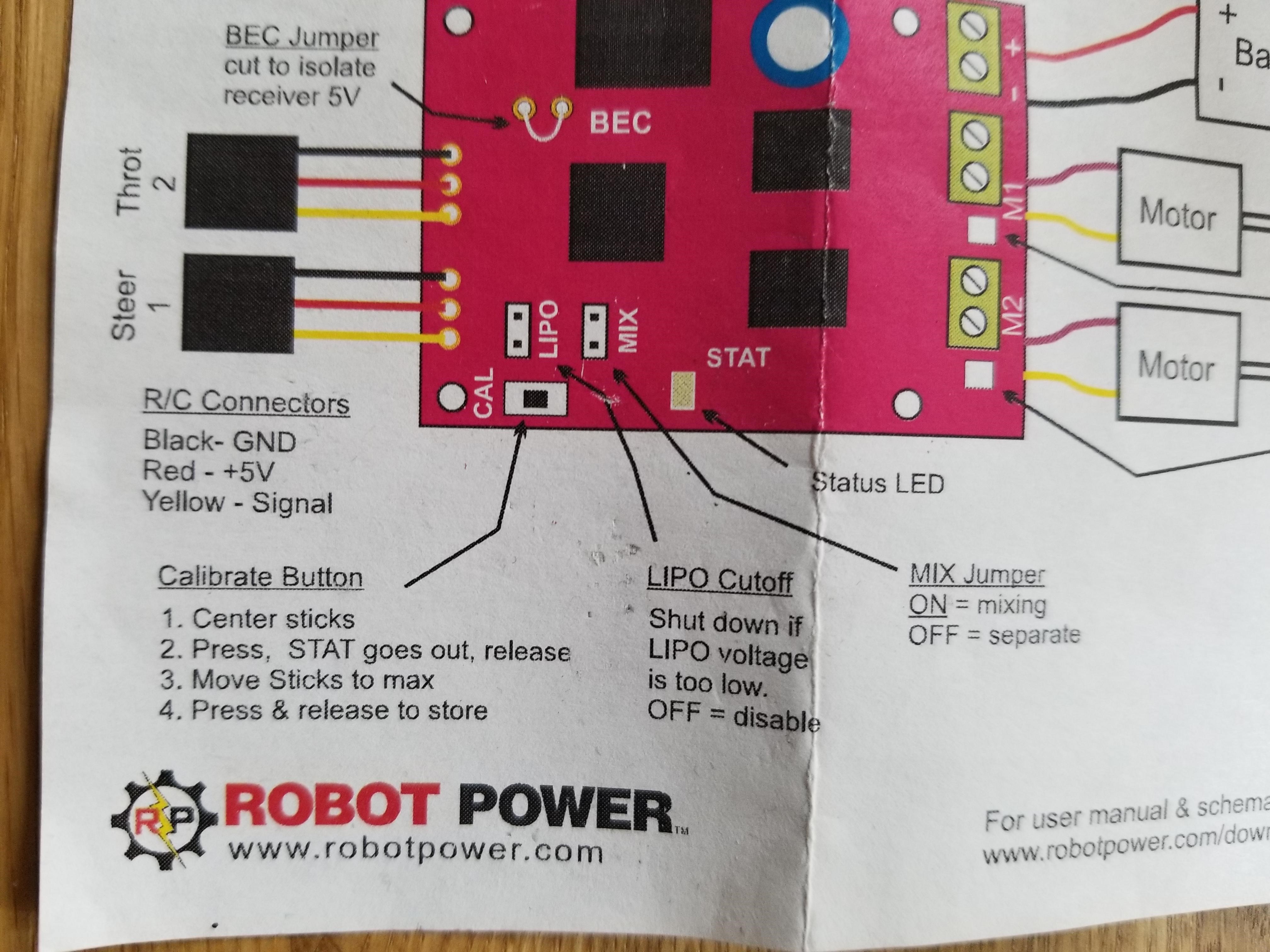
The mix Jumper is on for “mixing” as deliverd, board is calibrated, motor-LEDs are working.
BUT !!
There is NO backward movement possible. Instead: when moving throttle down, Status LED starts blinking.
Analog to this: steering works only in direction “stick up”. With “stick down”: Status LED starts blinking.
Other as described there is NO !!! failsave !!! Shutting down the TX makes the Status LED blinking, motorspeed is exactly as when TX was shut down.
There is NO usermanual available, other as stated in docu -> www.robotPOWER.com has no manual.
Is the board defect or do I miss some relevant Information?
What do I have to do to make the board drive the motory backward?
I really was unsure what might be the difference between “quickly” and “very very fast”. So I asked my spouse (she’s a musician, for real) to have a look at the pattern. I made the test and we both decided immediately and sponaneous: very very fast!
So here are the facts:
both channels between 1500 - 2000 PWN =>> everything’s fine
both channels below 1500 PWM (i.e.: 998 - 1498) =>> LED blinking very very fast
According to it, status LED should indicate:
Solid – all signals good, motors enabled
Slow blink – searching for required radio channels especially at startup
Fast blink – R/C signal lost or pulses out of legal range
Very fast blink – Calibrating radio signals (after Cal jumper placed see below)
iiiiiiiiiiiiiiiieeeeehhhhhk!
I hate … hm: that’s the question -> whom?
For short: everything’s fine from 998 - 2002 PWM (that’s TARANIS ).
“Scorpion mini” is working as expected and advertised.
So you may clouse this issue: thx for your help -> worked sucessfully.
If someone likes to know the “real story”: please read on …
BOYZ!
Handout said “how–2-calibrate”:
Center sticks
press a button
move sticks up
press button again
OK: this is exactly the way how you calibrate a “modern” brushed ESC (which mostly have a BRAKE-Funktion -> [my vote]).
What you actually have to do:
Center sticks
press a button
move sticks up and down several times (NOT only once as you need with “modern” brushed ESCs)
press button again
OK: this is exactly the way how to calibrate a “15-years-old” brushless ESC
I was building copters before: I should have known …
Lession learned:
before you hate someone else -> be sure you don’t get a kickback!



 I really was unsure what might be the difference between “quickly” and “very very fast”. So I asked my spouse (she’s a musician, for real) to have a look at the pattern. I made the test and we both decided immediately and sponaneous: very very fast!
I really was unsure what might be the difference between “quickly” and “very very fast”. So I asked my spouse (she’s a musician, for real) to have a look at the pattern. I made the test and we both decided immediately and sponaneous: very very fast! ).
). [my vote]).
[my vote]).


{kind=link}
{kind=link}