

Back in 1999 when I was still at school studying robotics after having served in the army, I was very intrigued by and curious about robotic exoskeletons. I was excited by the possibilities and back then I was following the company SARCOS who was doing some crazy stuff.
So, I decided to start experimenting. First I started with Lego, potentiometers, wood and glue…. then with a manequin. This is when my living room became a robotic lab.

Telepresence Mannequin with parts from orginal Lynxmotion robotic arm
Single servo controlled using a potentiometer
Then few years later, in 2008 (5 years after I founded RobotShop), I wanted to keep my people active on some R&D projects. We decided to work on the project code named “Humanitation”; a telepresence system. Usually, these kinds of systems are sadly limited to a web-cam on wheels and a screen, and are simply a glorified videophone. This is not the case at RobotShop since we love robots and are all about crazy projects.

Proof of concept using tracked mobile base
We starte with an existing tracked base (Robotics Connection) and added a Lynxmotion pan/tilt system and compact wireless camera. We re-wired the camera so the main battery would power everything.
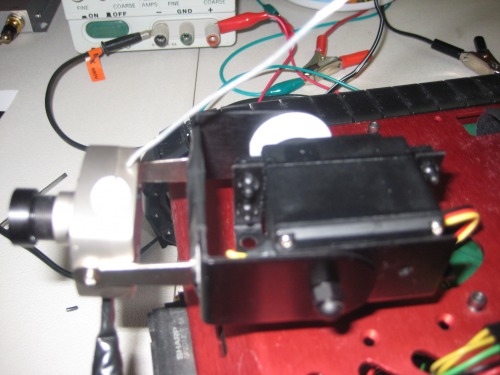
Camera added to pan/tilt
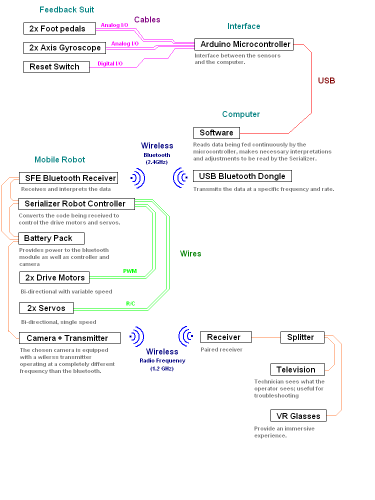
Since it's less fun for everyone who can't see the video, we split the video output to both the operator's VR headset as well as to a standard TV. It was a bit low res, but still worked.
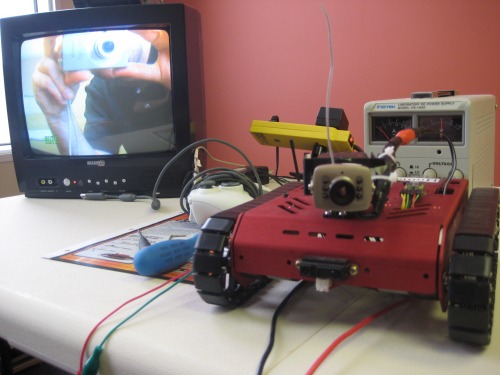
Video output was split between a TV and a VR headset

VR headset with accelerometer / gyro for tracking
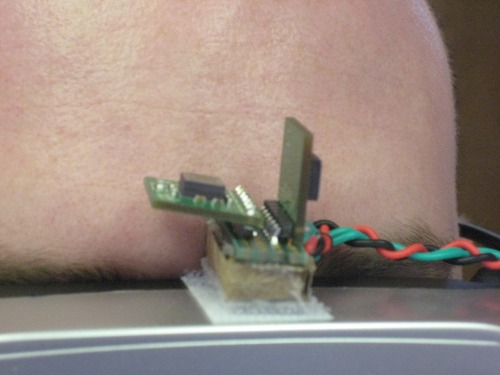
Closeup of removable head tracking sensors

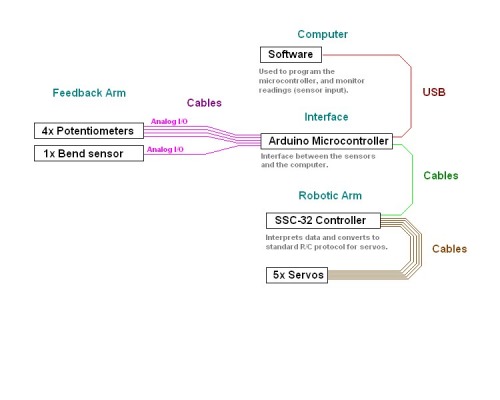
Simple potentiometer input controlled the Lynxmotion arm
A full motion controlled system was put together in order to provide a truly immersive experience for the user. The top part would control the Johnny 5 torso, the foot pedals would control the base and the head tracking would control the pan/tilt.
Brainstorming a control system for an arm
Brainstorming a control system for a mobile base
This is very similar to the "Justin" haptic suit by DLRfeatured in the past days, but a few tens of millions of dollars cheaper. The team and I did this mainly inspired by one of the coolest robots of all Hollywood history: Johnny 5 (from the Short Circuit movie).
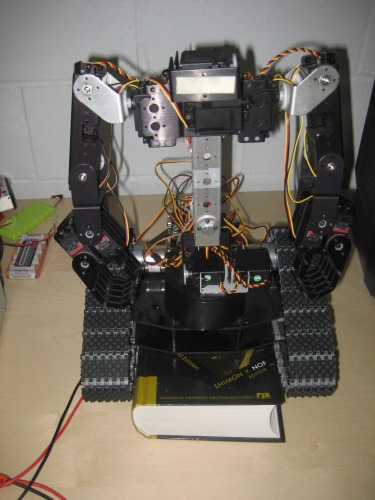
Customized Lynxmotion Johnny 5 robot
We did a lot of experimentation and in the end, the Lynxmotion Johnny 5 robotic platform was used, and a motion-capture exoskeleton was put together using mainly potentiometers and wooden sticks. Incredibly cheap but worked well.
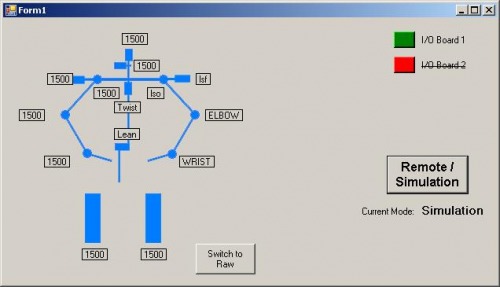
We created a simple UI used for troubleshooting and to send values

Our wooden telepresence system in all its glory

Bi-directional foot pedals using potentiometers

Work in progress

The final proof of concept

Puppet master

Complete with VR headset
Here's the list of materials used for the last prototype:
-
Many Rotation Sensors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/motion-capture-exoskeleton-johnny-5-style

