

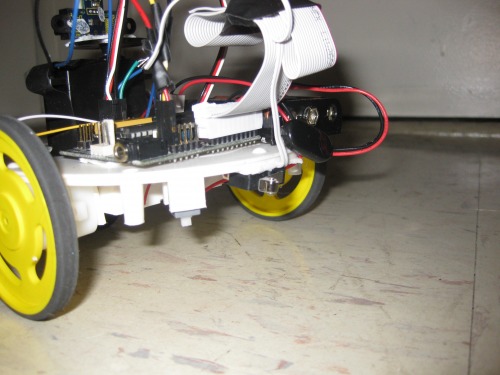
This is a robot that is based on the start here bot, and my CD Scout. It's basically the same input and output devices in the CD Scout, but this one has a better chasis and a switch in the rear that senses when it is runing into something and tipping backwards. It has 2 LED's. One that is green for when it is going forward, and one red for when it stops.
This is a pretty solid platform and i plan on testing and tinkering around with alot more types of input and output devices on this chasis.
The second video is some code that makes it track moving objects:
symbol detection = 50
let b1=150
main:
readadc 4,b1
if b2 < 180 and b2 > 120 then
low 5 : high 6 : high 4 : low 7
end if
if b2 < 120 then
low 6 : low 5 : high 7 : high 4
end if
if b2 > 180 then
low 7 : low 4 : high 5 : high 6
end if
if b1 > detection then gosub servoleft
if b1 < detection then gosub servoright
goto main
servoleft:
let b2=b2 max 200 min 100
inc b2
servo 3,b2
return
servoright:
let b2=b2 max 200 min 100
dec b2
servo 3,b2
return
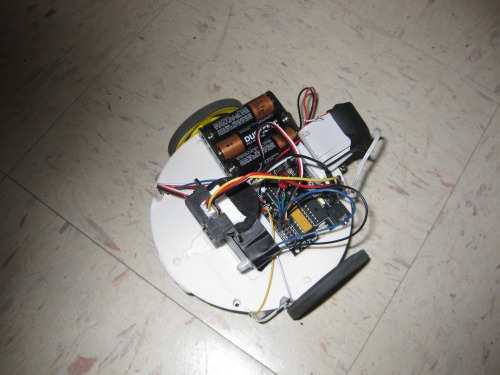
I was in a hardware store and saw the moonlights and thought they would be an excelent chasis so i picked one up and picked up a ball bearing wheel for the 3rd point of support for it:


It goes forward until it sees an obstruction and then turns towards the next most promising direction and goes forward again
- Actuators / output devices: roller-arm microswitch for tilt recognition
- Control method: autonomous
- CPU: Picaxe 28x1
- Operating system: Basic
- Power source: 3 AA on 1st circuit and 4 AA on second circuit
- Sensors / input devices: Sharp IR
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/moonlight-machine
{kind=link}