

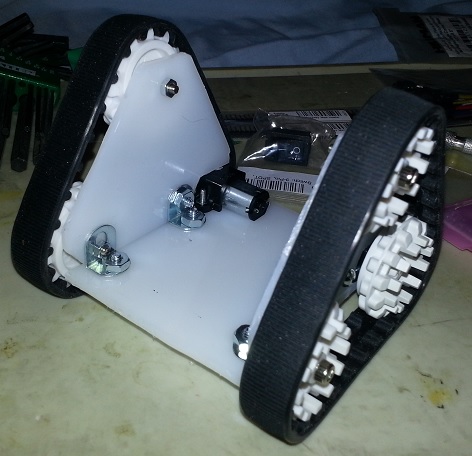
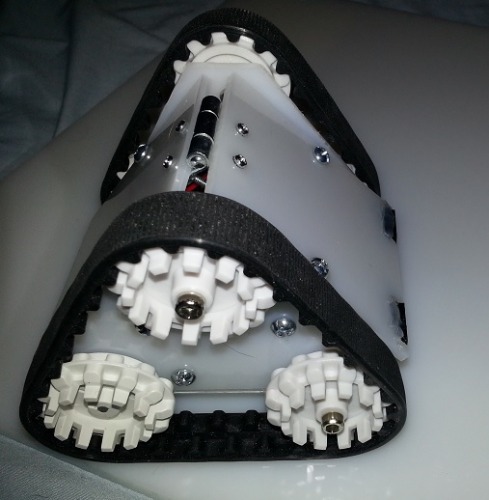
I had an idea to build a tracked rover, capable of driving even upside down. I came up with a design for each side to have a drive gear and two idlers in a triangle formation. And with that I started ordering the parts I would be needing, which unexpectedly arrived on a saturday. Sweet!
After drawing it out in pencil and getting rough dimensions I started cutting pieces out of 1/8" HDPE.

Pictured are the 150:1 micro gear motors, DRV8833 motor driver, Fio V3 with Xbee, and the tracks and idler gears.
Originally intended to use a flat 4.8v 2/3 A NiMH pack, but I managed to make the body a bit too small. I've got a smaller, cube shaped pack ordered, hopefully it will fit a bit better. I also had planned to use a Fio V3 with an Xbee, but I'm also finding that to be too tight a fit. So I'll likely resort to finally using the Arduino Pro Mini I picked up a year ago. I would really like to have that easy wireless connection, but it may not be in the cards. I'll have to see how an xbee carrier board would fit with the pro mini and motor driver...
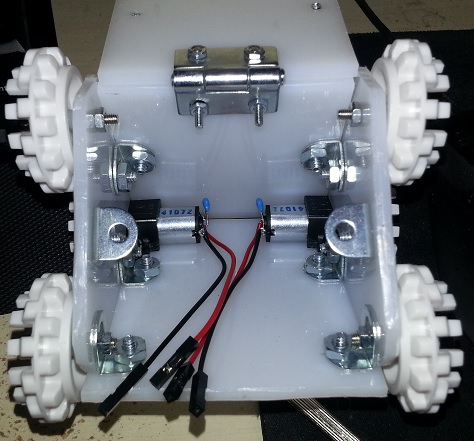
Motors wired, with filtering capacitors. I'm tempted to make a wider base and make fitting everything that much easier. This is how it sits right now.
Still to do mechanically:
- Decide on how to mount an IR sensor to the front for object detection.
- Nail down the microcontroller I'm going to use.
- Mount a power switch to one of the sides.
- Googly eyes?
2/11/2014
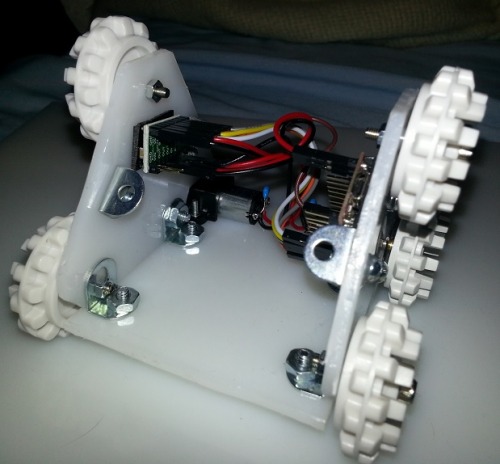
Mounted microcontroller (Pro Micro 5V) and the motor driver. Slightly concerned about the proximity to the metal brackets, but everything clears as it is. And should be space for the battery once it arrives. Just. Also posted video of first (successful) motor test!

2/13/2014
Mounted IR sensors to front of the bot using the ever useful hot glue. At present only the left sensor is connected. As such when it detects an object the bot picks a random number between 1 and 50, if it's below or equal to 25 it turns left, and above 25 it turns right. He's simpled minded at the moment.

I haven't quite met my design goals yet, the front end sticks out a bit too much allow driving on the front of the bot. Raising the mount points for the lid may alleviate that, allowing the lid to fold further in.
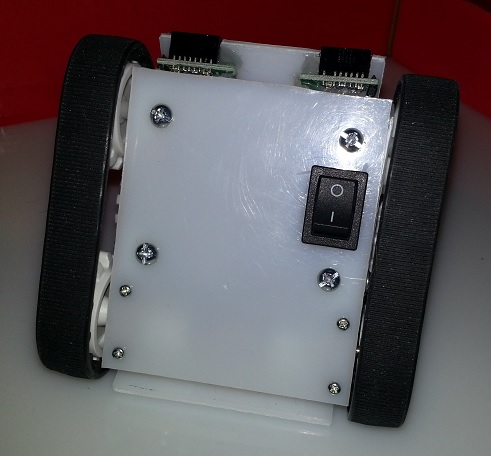
Power switch mounted to the underside rather than the side. More than enough ground clearance for the type of surface I would run it on. And precious little room on the sides to mount the switch anyhow.
And just because this is the first bot I've built from scratch, I felt it worthy of a little badge of honor. Had to eventually find a place to use one of those stickers!

2/14/2014
Added one more fun video of the bot tumbling down some stepped boxes.
Navigate around via IR, drive upside down
- Actuators / output devices: 2x 150:1 micro metal gear motors
- Control method: autonomous, XBee
- CPU: Pro Micro 5V
- Power source: 4.8V NiMH Battery Pack
- Sensors / input devices: IR
- Target environment: indoor on smooth surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/minitrack
