

38khz_code.bas (3861Bytes)
beacon_test_tracker_use_ctc_method.bas (2483Bytes)
beacon_test_tracker_use_ctc_method_0.bas (2903Bytes)
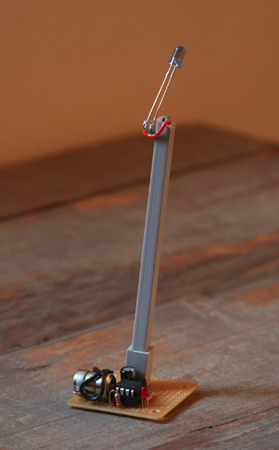
So this is the mini ir beacon I've had mulling around but never got around to building one....or finally built it. I'll post the current code for this in a bit.
The circuit is pretty basic in that it just uses a picaxe, an ir emitter, led, some resistors and a npn transistor. Ialso wanted to keep it small(hence the mini) so decided to use some lr44 batteries to get around 4.5v out. The battery holder was fashioned out of some 18ga colid copper wire which does a great job of holding things together.
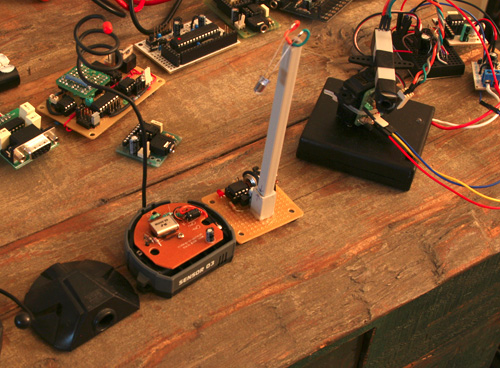
The setup
pin 2 of the picaxe goes to the collector and this is the where the 38khz carrier comes from
pin 1 is the serial data that goes to the base. There is also a led connected to the base so any signal that goes out causes it to blink.
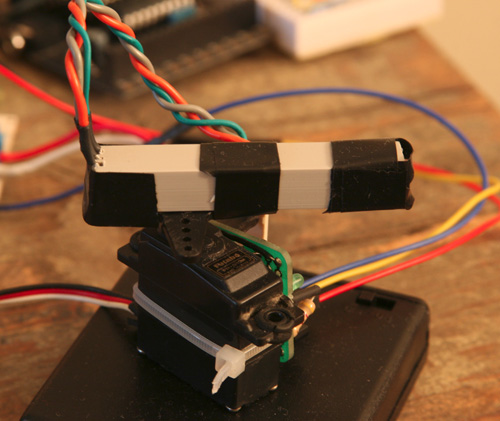
The main ir extender uses a 2 pin m to f connector at the bas of the unit so I can easily remove it and modify it for other purposes.
Expanding on the system to utilize the rest of the axe options to make it configurable.
I plan to expand this to take advantage of the other couple pins that aren't in use. pin 3 will be used as a simple button input.
pin 4 will be used to tune serial signal via adc input and based on a set of predefined strings that I will want to send out.
The application flow would be something like so: turn on beacon, have a delay that waits to see if it will be tuned(input 3 is triggered). if not, read variable in stored memory to find out what signal to output. go to beacon mode.
if 3 is triggered read stored memory and output the current beacon setting.
when 3 is triggered again, this sets the config mode.
read adc and output blinks from pin 1 to let user know which beacon definition the proc is configured to.
when this is set trigger input 3 again to set the beacon output string to memory. go to beacon mode.
the setup switch and dial to set the beacon will mounted on a small perfboard so as to be used on multiple beacons.
images of the beacon so far.

Edit:
I have the receiver side as well, which be be another post later.
To expand a little more, the configurable ones could be set in a different room/location while (dummy)beacons using 555/556 timers can be set in the room/location to help in triangulation. These should be simpler and cheaper to build.
Edit 5/24: -code update -see new post
Edit 5/25 -code update -see new post file size 2.83k
Edit 6/14 - added video of ir beacon and receiver in action.
https://www.youtube.com/watch?v=pBdXmc34Rk4



 1. can’t always
1. can’t always