2/11/10 - oops typo on the first post, its 3 IR's per side!!!
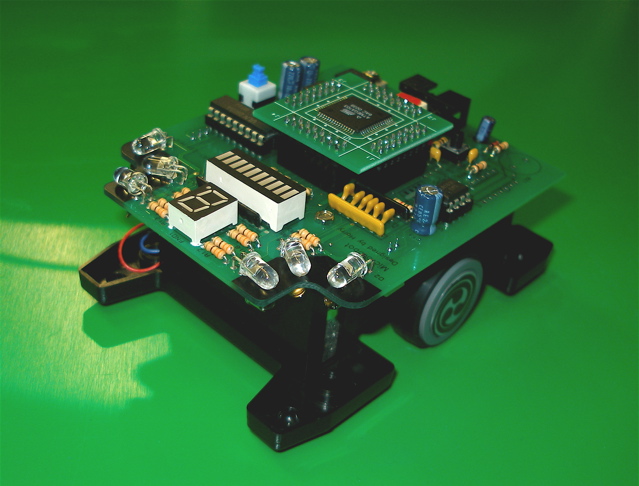
This is my Microrobot Robo-Lefter kit robot.
Its a pretty good wall follower type
maze solver robot for the price.
It uses a Atmel 103 micro and x3x
6 IR sensors, assorted indicators, with a ISP programming port.
In fact I was so happy with it, I bought a second one.

The old one I added a front bumper to, so that I can run it at full speed without fear of crash damage.
Wall Follower Maze Solver
- Control method: autonomous
- CPU: Atmel 103
- Sensors / input devices: 3 IR sensors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/microrobot-robo-lefter
IR sensors
Hi, Damm nice mace robot. Just have a few questions, why does it have 3 IR diodes at each front corner? And does it only have 1 reciver at each front corner, or does it have 1 for each IR diode?
RE:
Its got one emitter/receiver pair per direction. So there’s 2 going forward (1 per side) then 2 at 60 degrees (1 per side), then 2 at 90 degrees (1 per side). They are setup that way to maintain distance from the maze walls as it navigates. And actually the code is pretty simple by doing them this way. Because they are basically read as high/low whether there’s a wall reflection or not.
In the small picture, you can kind of see the receiver sensors under the top mounted emitters.