

This is my 3rd robot, the first non-frits-like ;)
I'll never post anything about previous robots: you can find many F-Like robots here.
Well, legged walkers are a class of robots that imitate the locomotion of animals and insects, using legs.
I'll try to build a six legged model, called a tripod gait, because a tripod positioning of legs always supports
the weight of the walker.
This walker robot is a compromise in design, but allows to build a sixlegged walker using just three servomotors.
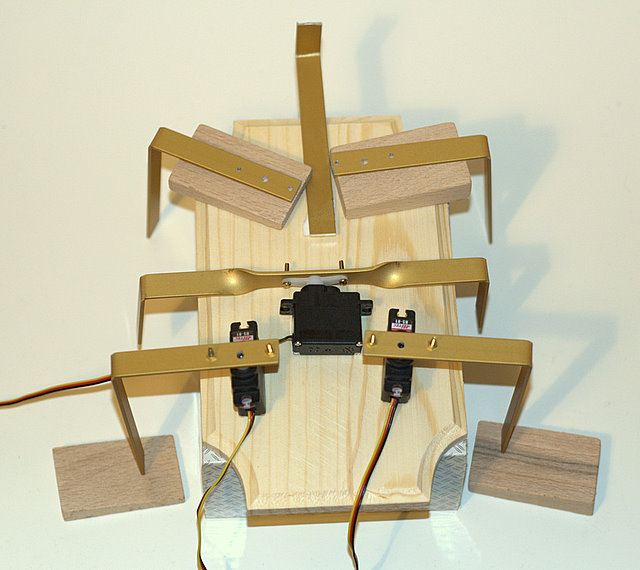
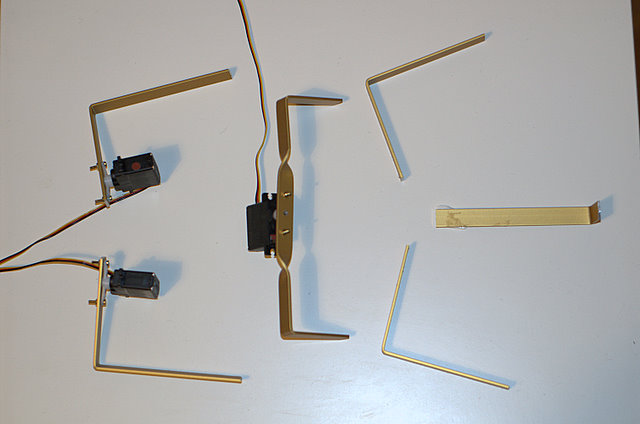
I'll use 2 Hitec HS-81 micro servos (12euros each) to move left and right legs; another servo will move the center legs.
All the legs are made fom 12x2mm thick aluminum bar (about 2 euros).
How can Mehw move forward ?
This is the starting position:
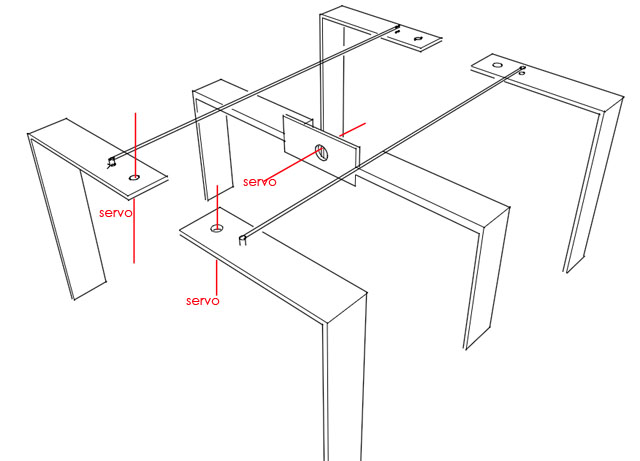
All the servos are in central position. Note that central legs are slightly shorter and normally don't touch the groun.
Now central servo rotate clockwise tilting left Mehw, so the right servo can move forward 2 right legs.
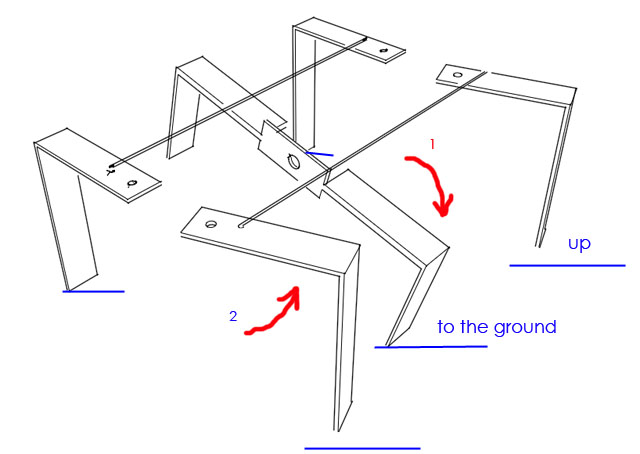
Next step is symmetrical: the central servo rotate counterclockwise, Mehw tilt to the right so left servo can push forward left legs.
Final step: all the legs are now forward, left and right servo can return to starting position moving Mehw forward.
Easy, isn't it?
I don't know if the HS-81 will be powerful enough to move the center legs and rise robot's body; anyway, i have a Futaba digital servo 9257 ;)An SFR05 ultra sonic range finder will be the Mhew 'eye'.
Next step: build the Mhew body. Suggestions are welcome ;)
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/mhew-my-hexapod-walker

 )
)
