I’ve got no sense of scale here. How big is this thing? it looks absolutely massinv ein the first and third photos, and I’m just not sure in the second.
Hey I like the photos! Gives it a sorta sci-fi like quality I think! In the 2nd photo this looks like a mech-like thing from above? Walk-sync…oh-my! That could be a big problem, especially with a biped. Are you planning to have some sort of active balance system (gyro, accelerometers)? I think I saw someone here in LMR do a self-balancing segway robot. You might try "self-balancing" in search.
Servos? One visible servo appears to be a Futaba S3004, a standard sized with 44 oz-in (3.2 kg-cm) torque at 4.8 volts, 57 oz-in (4.1 kg-cm) at 6 volts. You’ll probably find that these won’t support the weight of your robot. And that the plastic gears will tend to strip out. I don’t know if you have other types of servos at use at other joints, but it might be worth it to look at maybe HiTec HS-645s to start. There has been disucussion on a Tower MG995 servos here, that have some good torque but can be dodgy. I’m thinking through my own biped, and will probably risk the cheapy high torques or a close servo.
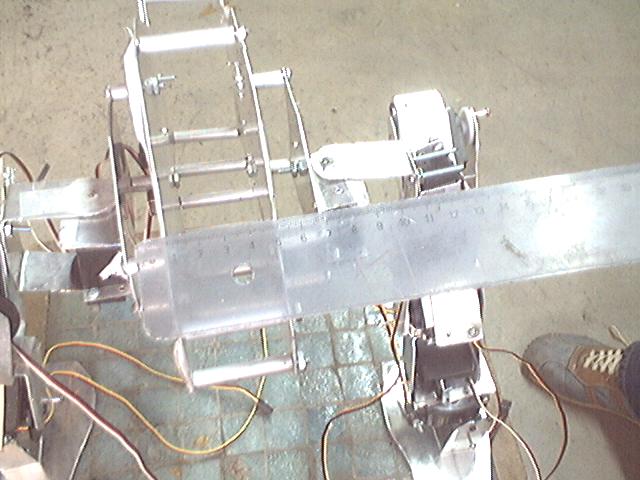
Look at the horizontal leg piece, has a servo on each end, guess it could be called a hip joint to knee joint. That one section appears to be about 4 inches (10 cm) long. That is essentially a lever arm that has to hold up a good share of the weight of your robot, the other leg with it’s 5 servos, plus the 2 above, plus the body, which might add up to 0.8 kg of the 1 kg estimate. The servo is 44 oz-in or 3.16 kg-cm, so it could lift 0.8 kg only on a lever length of 3.95 cm, not the 10 cm of leg you have. To lift 1 kg on a 10 cm leg length, you’d need a 10 kg-cm servo, at least. And this is not considering the weight of any battery, I’m guessing. It might be best to look for servos that have at least 10 kg-cm for your robot, at least as far as lifting joints are concerned.
Weight / Leverage The reason THIS project came to a standstill (!) was that the servos (similar to yours) didn’t have enough ooomph to shift a 6xC cell NiCD from left to right on the end of a lever 15cm long. It’s not just about weight. My servos would easily lift the motors off the ground on a shorter lever. That said, the legs worked quite well and it weighs a little over 1Kg. The only thing is your legs seem to be longer. Again, it’s a leverage thing.
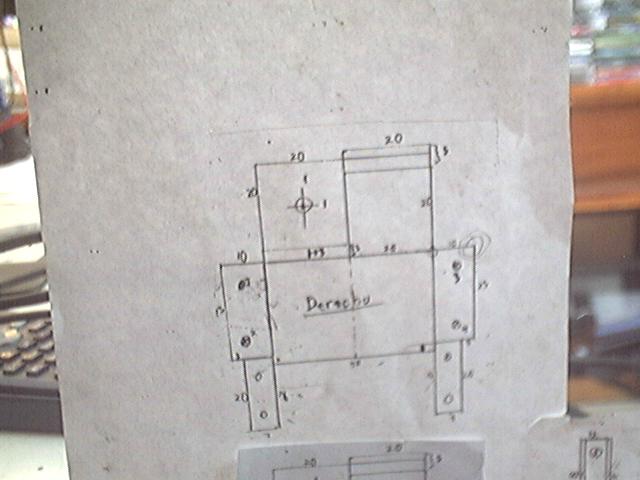
it is home made, the exoesqueleton is aluminum 1/16 inch (30$ sheet) and if you have the materials and the schems takes 2 days to put together. i will continue working on it wen the semester end.
Yeha Yeha, but i was born with a horrible hand precision… so as you can imagen the the parts are not 100 grate. Thats why a cnc might do the trick (cunrrently on the way)