



METAL REX
This is my second proyect i decided to make a biped ( in emulation of the metal gear saga )
the circuit that controls the servos consists in a pic16f88 and i also use the arduino decimilla
am going to post the drawings and schmes in a couple of days
any tips with the walk sync or any other subject are welcomed.
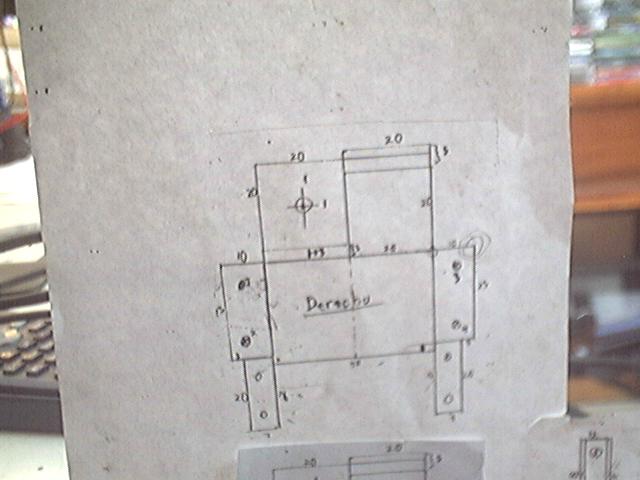
the the mesurements are in cm and they where made out from the servos
there are 2 kinds of servos in this proyect futaba 3004 and hi tec hs-311 (standard servos)

Ok here are some better pics
ANKLE


Sides


Front

front and hip

TOP
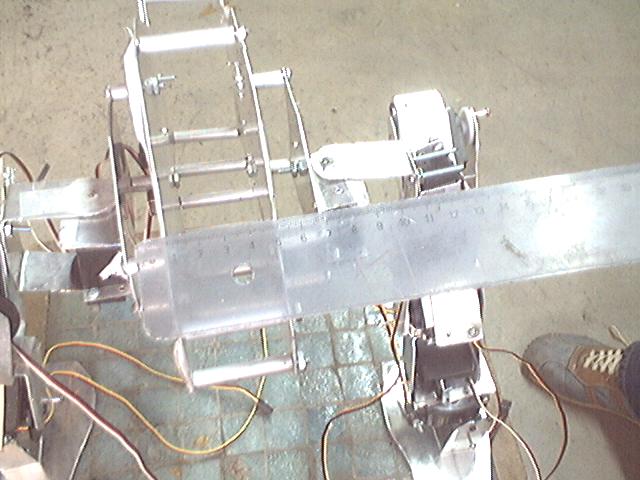
Servo brackets all the numbers arein cm
Walk
- Control method: autonomous
- CPU: 16f88
- Operating system: Linux, Unix
- Power source: Racing Pack
- Programming language: Assembler
- Sensors / input devices: Parallax Ultra Sound
- Target environment: outdoor