

So for my final year project, I decided to do a Hexapod platform. Started out as an obsession and ended up as a money gobbling monster. (You know how it goes)
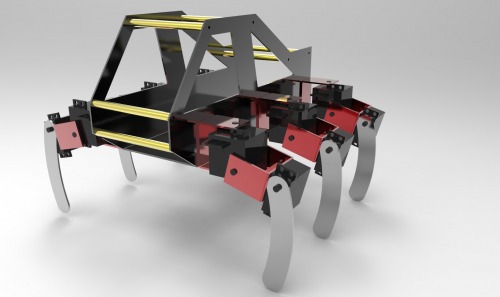
Concept:
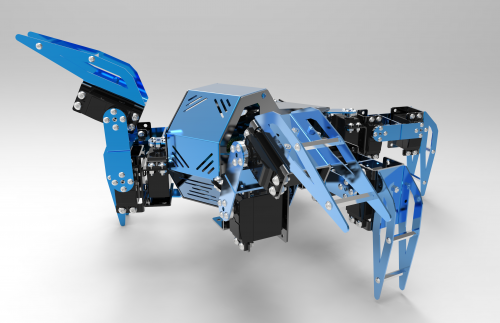
Final Design:
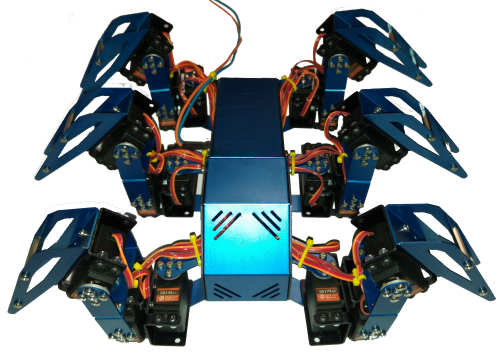
Final Assembly:
So i've uploaded ALL of the CAD files and ALL of the manufacturing files to GRABCAD and i've added a short description of each component used at my BLOG. Honestly, i'm too lazy to duplicate everything here :P.
Maiden walk:
The programming here in this video is just a loop for illustration purposes. I still have to finish the programming for the PS4 controller and write proper gaits for it (Tripod,Wave & Ripple modes). Actually, now that i'm thinking about it there is still a lot of work to do. (Will it EVER end???? :D)
Let me know what you guys think, good or bad will be taken with a pot of salt. Thanks
Walk around and stalk cats?
- Control method: Bluetooth
- CPU: arduino uno
- Programming language: C
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/mechwarrior-hexapod-robotic-platform