Hi everyone. I ´ve bought this dual dc motor driver in RobotShop https://www.robotshop.com/es/es/cytron-conductor-motor-dc-doble-canal-10a-5-30v.html to control 2 dc motors with PWM and Arduino. I´d like to know what output voltage of the motor driver should I see reaching the motors. I´ve some doubts about some dc motor parameters too.
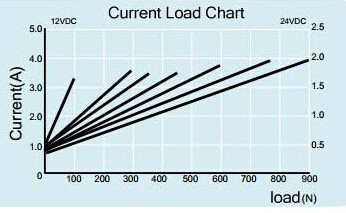
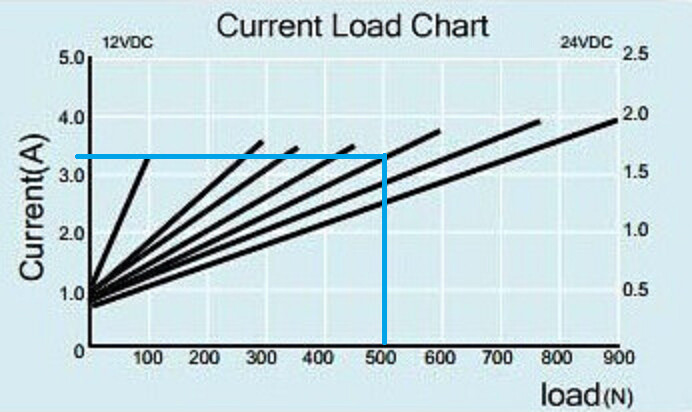
For example, I want to control a 12V dc motor which has a current of 3A with a load of 500N, if I introduce a duty cycle of 50%, what output voltage of motor driver should I measure? I´m very confused with this topic because I´ve seen a lot of different ways of calculating this.
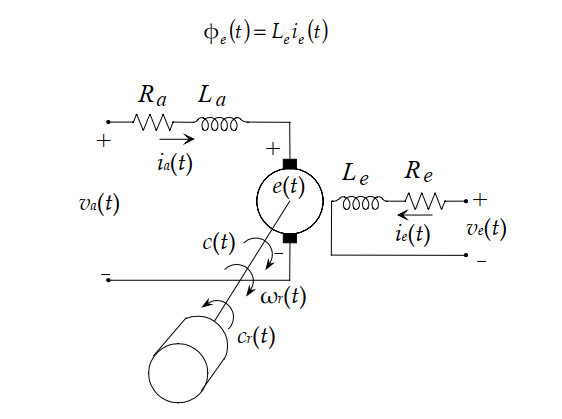
First of all, I´d like to check the dc motor parameters:
Power = Voltage * current = 12V*3A = 36W
Resistance = Voltage/Current = 12V/3A=4ohm
Is this resistance constant? How can I measure this motor resistance with a multimeter? Do I need the motor to be working in a specific way to measure this resistance correctly with the multimeter?
Once I have the motor parameters, I´m going to explain my doubts. For example, with a duty cycle of 50%, I´d have the following calculations with the average voltage:
Vave = 0.512V=6V
Iave = Vave/R=6V/4ohm=1.5A
P=6V1.5A=9W
Why do I have a power of 9W? That is the 25% of the total power, shouldn´t I have the 50% of the power, I mean, 18W?
If I use the RMS voltage, I´ve the following calculations:
Vrms=square root(duty cycle/100)*V=square root(0.5)12V=8.48V
Irms=Vrms/R=8.48V/4ohm=2.12A
P=8.48V2.12A=18W
If I use the RMS values, I´m obtaining the correct power I think, but my question is, why is there that difference? What values do I have to use? Will my dc motor have a power of 18W(50%) or 9W(25%) with a duty cycle of 50%? Will my dc motor receive a voltage of 8.48V and a current of 2.12A or a voltage of 6v and a current of 1.5A (or 3A to obtain 18W)?
I´m not sure of the calculations, so the first question is if they are correct.
And for finishing, will I need a trueRMS multimeter to measure the correct values?
Forums/Blogs list where I´ve read different things:
1.Here it´s said that with a duty cycle of 50%, you obtain a power of 25%:
PWM not causing motor to turn until 50%
2.In this forum, the poster has a doubt similar to mine (I think), and people say that he obtains a wrong value (25% of the voltage with a duty cycle of 50%) because of he is measuaring with a normal multimeter, and they say that you can obtain the correct value (50% of the voltage with a 50% of duty cycle) with a TRMS multimeter, hence, you obtain the correct power:
3.Here it´s said that you can calculate the RMS voltage of a PWM with a constant = 0.7:
4.Here it´s said several things. Firts, they say that RMS voltage and average voltage are the same. Then, they say that with Vrms, you obtain the 50% of the power with a 50% duty cycle and the 25% of the power with a 50% duty cycle if you use the average voltage for your calculations. Later they said that if you double the voltage, you will quadruple the power:
5.Here it´s said that if you use DC with no ripple, Iavg= Irms and Vavg=Vrms:
- Here there is another discussion about what values you have to use for the calculations (rms or average):
https://www.avrfreaks.net/forum/rms-current-measurement-square-signal
Thank you very much,
Alberto.
 a great sin in science! That and not labelling your tables/graphs!).
a great sin in science! That and not labelling your tables/graphs!).