

This is Mazie, the maze solving robot. She is my first project using arduino. My eventual goal is for her to follow a line maze, then go back and find the shortest path. Thanks to patrickmccabe for his maze solving tutorial, it has been very helpful so far.
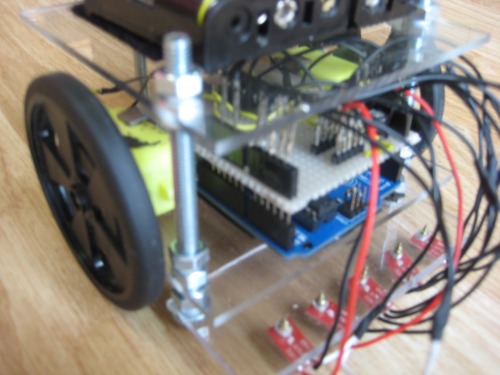
At the moment, I have finished the chassis and the electronics, and begun the programming. I originally planned to use a motor shield, but they all seemed a bit expensive so I made my own on a bit of perfboard, using an L293D chip. It was my first time soldering on perfboard and I managed to spray molten bits of solder everywhere (but luckily I didn't short anything together!).
The programming is a lot harder than I expected, simply because the sensors aren't perfectly aligned so I have to add in a lot of delays to make sure Mazie doesn't turn the wrong way. So far, I have got her to solve a maze using the left hand on the wall rule, but I haven't programmed her to go back and find the shortest path yet. I have written some pseudocode for this and should have it complete (with video) soon.
In the meantime, please enjoy these pictures :-)
UPDATE 20/08/12 ----------------------------------------------------------------------------------------------------------------------------------------------------------------
Mazie is now able to solve a maze and find the shortest path. I have added a video of her doing this. I'm fairly pleased with the outcome of this project as Mazie can solve all the mazes I set her without mistakes, however she is very slow and quite large. In the future I may build a smaller, faster version, but I will call this one finished.
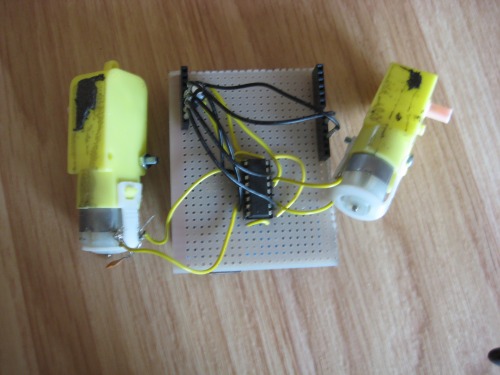
^ the motor controller ^
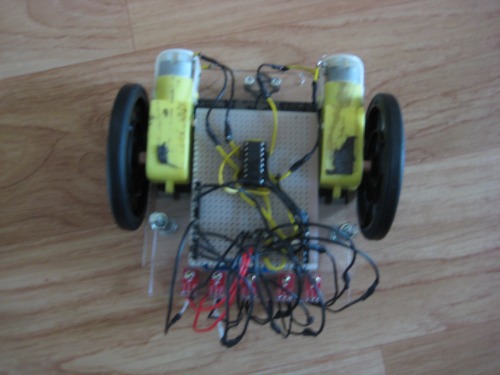
^ the bottom layer, with no batteries attached yet ^

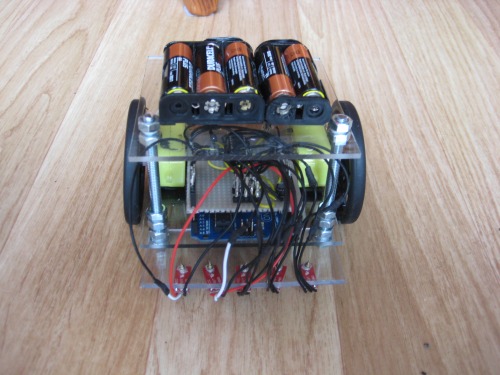
^ top layer and batteries attached ^
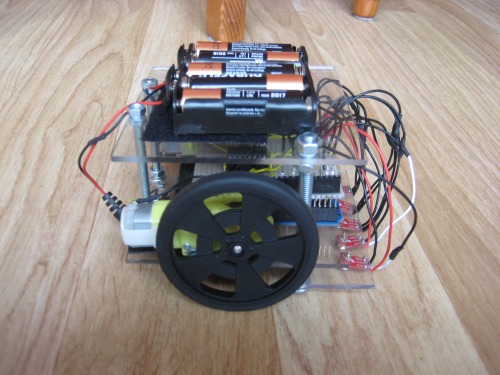
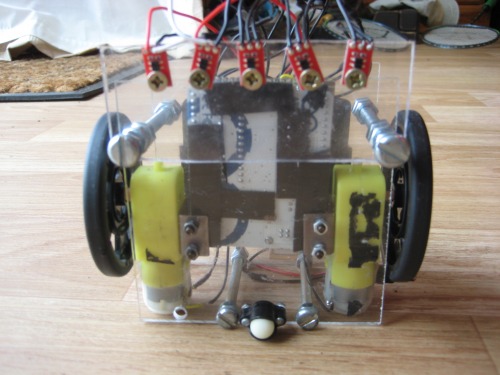
^ side view ^
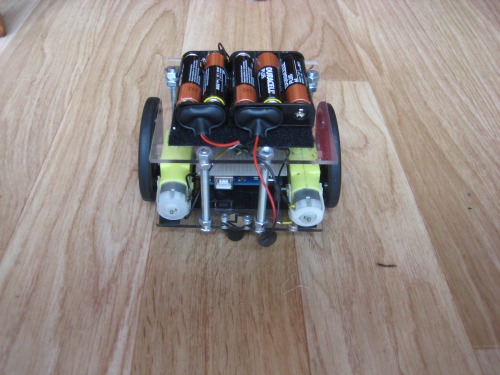
^ the rear end ;-) ^
^ the underneath (yep, the arduino is just stuck down with tape!) ^
Ta-daa!
navigates a maze and finds shortest path
- Actuators / output devices: 2 x 1:120 motors
- Control method: autonomous
- CPU: Arduino Uno (atmega328)
- Power source: 5 x 1.5V alkaline batteries (7.5 volts)
- Sensors / input devices: 5 QRE1113 analogue reflectance sensors
- Target environment: indoors, black line on white surface
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/mazie-the-maze-solver