

The MARC series were designed to test various aspects of bipedal robotics.
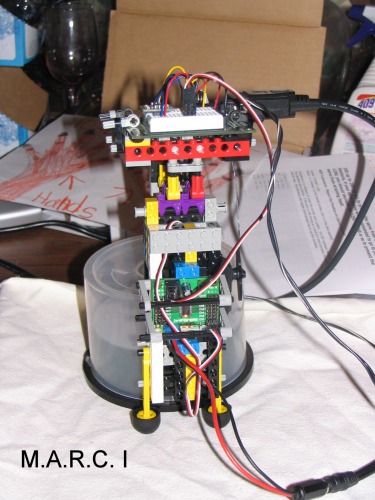
MARC I was a 1 degree of freedom robot built to test basic balance control. Consisting of one servo, an accelerometer and a Basic Stamp PIC. The unit was connected to a laptop for simple PID control. As MARC I would tip to one side the servo would tilt the upper half to regain balance.
MARC II was a 12 degrees of freedom robot built to test basic bipedal movements. Consisting of twelve servos and a servo controller. The unit was connected to a laptop for animatronic control of the leg movements.

MARC IIIa was a 12 degrees of freedom robot built to test additional bipedal movements. Like MARC II, MARC IIIa also had twelve servos and a servo controller. The unit was connected to a laptop for animatronic control of the leg movements.
MARC IIIb was a 16 degrees of freedom robot built to test additional bipedal & balance movements. MARC IIIb added two arms containing four additional servos. A laptop was used for control of the leg movements.

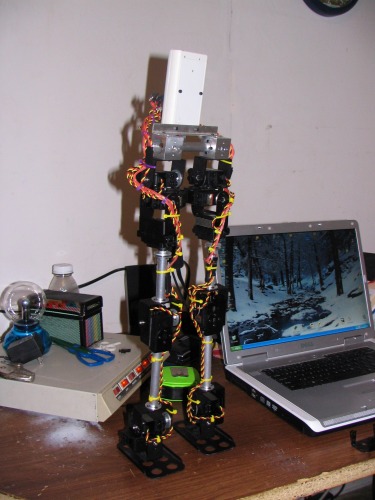
MARC IIIc was the last in the MARC III class and was a 29 degrees of freedom robot built to test advanced bipedal, balance & visual routines. MARC IIIc added upgraded arms and a camera head. Adding 13 additional servos made MARC IIIc the most advanced biped in the MARC series. A laptop was used for video processing, balance monitoring and leg motion control.

MARC V was a full size mockup used for structure analysis. It was used for selection of motor sizing, sensor placement as well as weight distribution. Linear actuators were utilized for most joints instead of hobby servos. The single camera used on MARC IIIc was replaced with twin cameras which allowed for Binocular vision and distance calculations. At 7 feet, MARC V was the largest in the MARC series.

The MARC series spanned over ten years of research & developement. The lessons learned from the series are now being incorporated in the ADAM series.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/marc-bipedal-series