

Hi all,
My plans are as follow: I want to make my RC car into fully automated version.
Top view of car: http://i1265.photobucket.com/albums/jj519/soni991/RC%20Car/IMG_6682.jpg
Front view of car: http://i1265.photobucket.com/albums/jj519/soni991/RC%20Car/IMG_6683.jpg
Back view of car: http://i1265.photobucket.com/albums/jj519/soni991/RC%20Car/IMG_6684.jpg
Bottom view of car: http://i1265.photobucket.com/albums/jj519/soni991/RC%20Car/IMG_6685.jpg
The function involves (I give it as Version 1.0)
1) Steer itself throughout the house without bumping into any object.
2) when power goes down then take itself to the powerport for charging. also it should check the battery power charge if it is sufficient and not overcharge the battery.
3) Goes on sleepmode after every half an hr of operation and then powerbackon after 1 hr ( that is changeable) .
these 3 basic function i need follow.
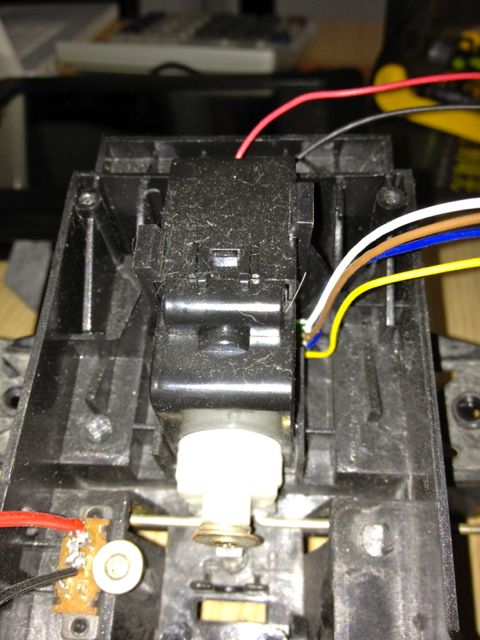
I have RC car with 2WD. The steering wheels in front are of angular movement(it moves only to certain angle) : http://i1265.photobucket.com/albums/jj519/soni991/RC%20Car/IMG_6672.jpg
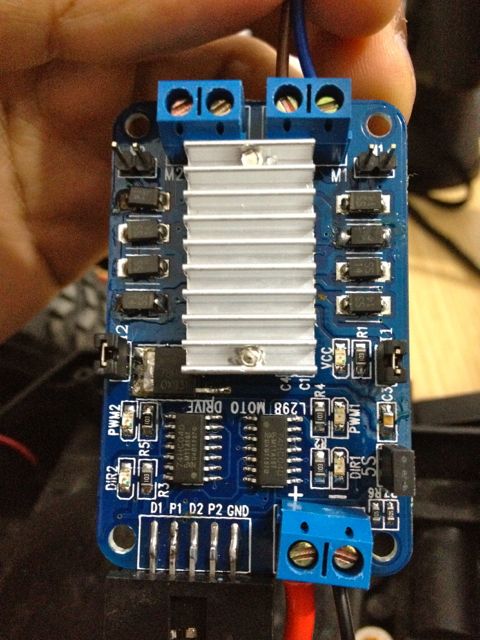
What gadgets i have available :
Picture: http://i1265.photobucket.com/albums/jj519/soni991/RC%20Car/IMG_6689.jpg
List:
1) MCU = Mega 2560.(not in picture)
2) HC-SR04 1pc
3) US-100 1pc
4) SD memmory card using SPI protocol 2Pcs
5)TCRT5000 2PC
6) Microphone 1pc
7) Light Sensor 2pc
8) Audio amplifier 1pc
9) Accelrometer 1pc
10) Bluetooth 1pcs
11) USD to TTL 2pc
12) NRF 24L01 3pc
13) 10Pin to 6pin AVRisp 2Pcs
14) logo sensor 1pc
15) CP 2102 USB to TTL 1pc (not in picture)
16) lot of jumper wires and solderless board. not in picture
17) HC-SR501.
More parts are coming so i would update those list.
So I am good to go with parts, how to start building smart robot with clean code.
Please can anyone tell me how do i configure the steering wheel of this car on arduino? i have put all the pics here: http://s1265.photobucket.com/albums/jj519/soni991/RC%20Car/
any one suggest any new parts please let me know so i can purchase it and use on this project.
1) First thing i need is suggestion about what parts i should include for the basic function in Version 1.
2) Second the Programing Code written from scratch with everyone contribution.
Hope i can have feedback from taleted people online.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}