

Hello,
I would like to know what wiring the standard Lynxmotion tri track chassis (no electronics) takes to be wired by an SSC-32U USB Servo Controller, I see the wires are very non-standard,
Thank you
Hello,
I would like to know what wiring the standard Lynxmotion tri track chassis (no electronics) takes to be wired by an SSC-32U USB Servo Controller, I see the wires are very non-standard,
Thank you
@Sysop1996 Welcome to the RobotShop Community. You only need an RC motor controller. The suggested model is:
IMPORTANT: This motor controller supplies 5V on the red pin, so it needs to be removed from both connectors:
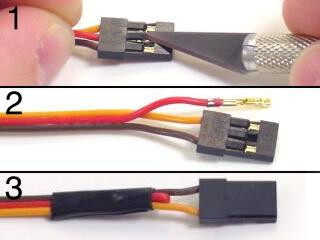
Wiring guide:
I don’t want to use an RC controller, I will be powering the SSC-32U USB Servo Controller with a Raspberry Pi which will be connected to it via USB.
How would I wire it in that case?
To check, is all the wiring included in the no electronics tri track?
Thank you,
The SSC-32U provides RC signals, so if you want to connect a motor controller to it, the motor controller needs to accept RC signals.
Raspberry Pi → SSC-32U → Sabertooth → Motors
Not sure how you will power everything.
Hello Cbenson,
To power the Raspberry pi, I will use a phone 5v power bank.
To power the SSC-32U, I think I could use a 12v lynxmotion battery: https://www.robotshop.com/products/120v-2800mah-rechargeable-nimh-battery-pack
I don’t know how to power the Sabertooth however, any ideas?
Thank you,
Sysop1996
It gets its power from the battery used for the drive motors (6-18V). You would therefore use:
5V power bank for the Raspberry Pi
6V or 12V (depending on your motors) for the Sabertooth and SSC-32U input.
Hello cbenson,
How would I connect the battery to both the SSC-32U and the Sabertooth?
Thank you,
Sysop1996
Do you have a connector for the battery to the Sabertooth? If not, consider:
You would need to screw the red wire to the red (positive) terminal of the Sabertooth along with another length of wire which goes from that to the VL+ on the SSC-32U. Same for the black (negative connector). What this does is share the battery voltage between the two. You’d need some spare cable somewhere. Doesn’t need to be anything fancy.
If you’re not sure about the connections before you apply power, take a photo or two and share here first.
Hello cbenson,
I found this motor controller that replaces the sabertooth and ssc-32u, take a look, is it compatible?
Thank you
The current of the DC gear motors at peak efficiency is ~0.8A, while at peak power it’s 1.75A. The motor controller you link to seems to provide 0.6A and 1A peak, which might not be enough. Something a bit safer:
… and many others.
Motor used in the Tri-Track:
Hello cbenson,
Thank you for your help, I think I will choose the bottom cytron for it’s button control feature.
One question for you, where do I connect positive and negative on a battery with the Vin and ground pins on the board?
Thank you,
You will need a cable between your battery and the board. Ensure positive to Vin and negative to GND.
It’s important you read through the manual which includes all connections.
Sample code for later:
Hello cbenson,
Thank you so much!
The only issue I have is that the Cytron looks like it restricts the Pi because it sits close to it. This is especially concerning considering the pi5 needs a cooling fan to function normally.
Do you know the clearance of the hat?
Thank you,
Hello cbenson,
The tri-track chassis has a maximum payload capacity of 5lbs which may be tight with all of the batteries. Is it possible to exceed this payload by a few pounds?
Thank you,
Valid question. On their website they don’t seem to indicate the RPi 5 specifically, though they do indicate it’s compatible with RPi4. Might need to reach out to them to confirm, but you can always add stacking headers to move it farther away from the Pi.
Is it possible to exceed this payload by a few pounds?
You’ll reach a situation where the robot cannot turn on the spot or move up inclines. If you’re considering a heavier payload, you might want to try a more expensive but much more powerful tracked platform like the A4WD1 MTS:
