This is my first attempt on building an 'arty' bot.
I didn't know before I started, that this would be the most time instensive robot I 've ever build. But I've learned a lot of new things like: painting, polymorph etc.
As the name suggested, it should look like the robot in the LMR logo. I am not sure if it looks similar, but ok, this is my first art work, so be patient with me.
Controller:
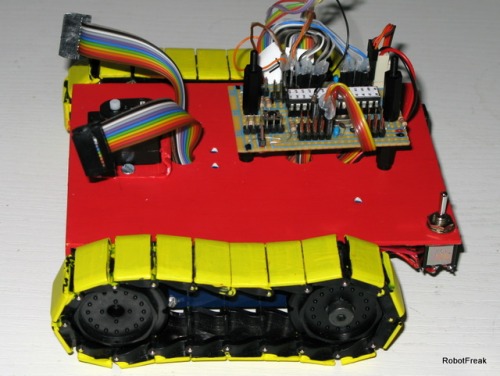
As usual, an Arduino clone has been used for the electronic brain. To hide most of the electronic stuff, a brain from Polymorph has been created.
Platform:
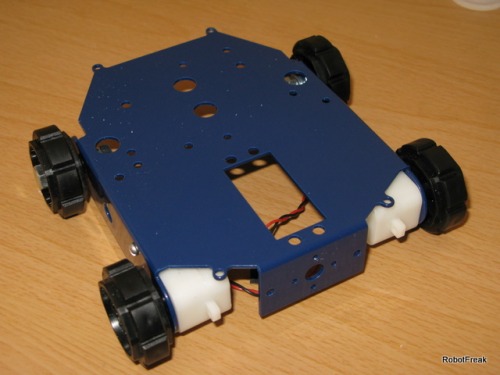
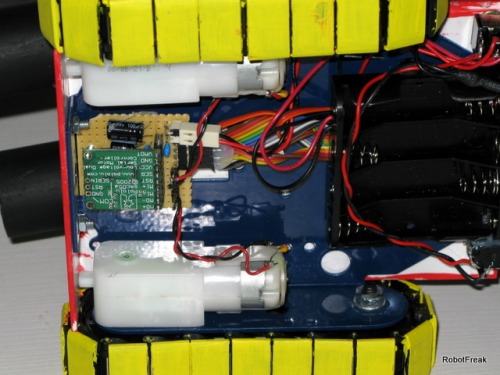
The robot platform is the Robot Rover for Arduino from Robot Shop, decorated with sheets of Polystyrene. The most difficult part was to color the black tracks into yellow.
Sensors:
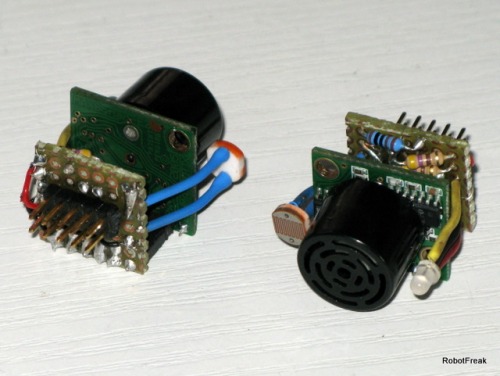
2 Maxbotix EZ1 ultrasonic sensors for obstacle avoiding. They fits perfectly into the 35mm film rolls I've been using as robot eyes.
2 LDRs for ambient light detectors
All sensors has been put together with the Duo LEDs into the film rolls. See my blog post about howto connect 2 ultrasonic sensors.
Actors:
A LVDSMC from Pololu has been choosen as motor controller for the GM9 1:143 geared motors. Build with FETs it brings the most power out of 4 AA cells for the motors.
2 Duo LEDs (red/green) as distance indicators. No object in sight meens green LEDs are glowing, in a middle distance of 30cm the LEDs glow yellow. Near objects are shown red.
A BlinkM RGB LED will illuminate the Polymorph brain, to indicate the robots emotions.
Update: 05.03.2010
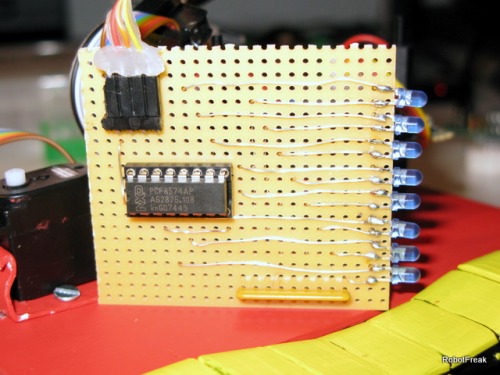
A POV (persistence of vision) display has been added to the LMR Logo-Bot. Now the robot can write messages of light into the air. Because of the low speed of the robot the messages can only be seen by a bulb exposure taken with my digicam. In the second video you can see the POV display in action.
The POV display is made out of 8 blue LEDs. Because I don't have enough free ports a PCF8574 I2C port expander chip has been used to connect the POV display to the Arduino.
Further work:
the front servo needs to be move a little bit, to give more place for the POV display.
I've ordered some RGB LEDs for the brqain illumination
Hack the GM9 motors to add wheel encoders
Navigate around via ultrasound, detects light sources
Actuators / output devices: 1:143 GM9, 2 Duo LEDs, BlinkM RGB LED
I’ve been waiting for this to happen. Congratulations for being the first to actually do it. It looks great and I love the technical details on the “super secret” object sensors.
Hiding the uC in the brain may be a necessity, but as art goes, that is brilliant!
(And I will repeat it once more: it is a shame that those tracks are no longer available in the intended colour: YELLOW!)
Thanks a lot guys. I know Thanks a lot guys. I know you will like it. This robot is dedicated to the best robot forum ever, it in inspired by many robots I’ve been seen here.
Cmon, Man! You were almost there. Cmon, Man! You were almost there. All you had to do was paint that brain purple and red and you would knock it down 90%. The final 10 % is on the base which is actually orange, not red. Don’t just replicate, duplicate!
You guys bring up some points I’ve been thinking about during building the bot.
What features will the bot have? I suggested, the 2 sensor ‘eyes’ will be better than only one. But at the moment I didn’t see, that, except for the LDRs. The Ultrasonic sensors, gives mostly the same result. Hard to detect if an obstacle is more on the left or rigtht side. Only very near objects can be detected this way.
Will it represent LMR only as a copy of the logo? Writing LMR should be possible. I could modify the GM9 motors with encoders, like Gareth showed us in his brilliant article. Without encoders, it will not work. I think I will give it a try.
@Zeitron, yes I hope it will become 90% look like the logo. The Polymorph brain will be illuminated with a RGB LED. Unfortunately I fried my BlinkM LED during the video shooting. Now I need to build a new one. Here is a nice BlinkM clone perfect for my needs.
Next time instead of painting your tracks yellow, try some Plasti-Dip. Available in different colors also. Rubberizes plastic and gives traction. Much better than applying tape for grip. Somebody shoot the guy in the video please!
More traction on a tracked vehicle? More traction is not necessarily better. Many builders of living room robot complain that their creation cannot turn a corner without ripping fibres from the carpet. Never that the vehicle slipped while pulling a heavy load on hard wood.
Of course! If your on carpet Of course! If your on carpet you don’t mess with it. The traction part was only for those out there who are using tape to increase grip for whatever application…Now if your trying to pull things on carpet, then I would say put a “rubber” on it.