

Hello all LMRians.. Am back with a new IMIM project..A humaoid ..
I had started the project last year just for a hobby and had not giving much fought into what all matters it will be useful.Most of the designing part was done on simple A4 paper.
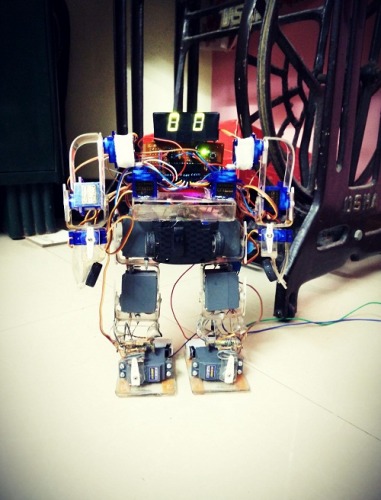
The robot uses a Picaxe 28x2 and a picaxe 18m2 microcontroller. A Bluetooth module is connected to 28x2 and a serial connection is made between the two picaxe for inter picaxe communication.
LinQ is controlled using my android phone through bluetooth.
Now it can pick up small things,Wave hii :) . TRANSFORM into a car ;)
If you could please suggest me some ideas for the robot to do.
The wheels seen on the gripper can be used for changing the direction of the car. The transformation part is still a bit in construction coz its hard to get back up to standing position.
Now coming to the parts -
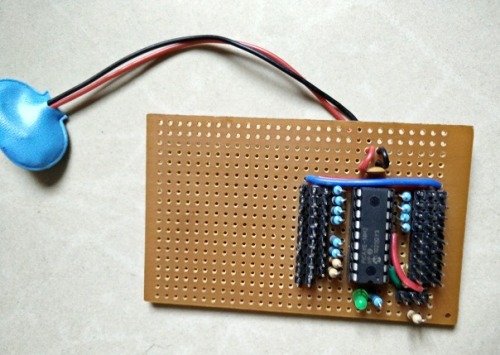
Picaxe 28X2 board-

Picaxe 18m2 board-
I am using 6 of these servos for the legs- http://www.hobbyking.com/hobbyking/store/__16269__HK15138_Standard_Analog_Servo_38g_4_3kg_0_17s.html
these are analog servos. :(. n they jitter a bit. So had to use some capacitors to minimize the jittering.
Later i have added a small geared motor n wheels to the top end of the leg for riding it like a small car ;)..TRANSFORMER.. :)

the legs are controlled by the 28x2. I have added an angle made with some metal wire, to act as a small spring joint.
For the hands am using 8 of these servos- http://www.hobbyking.com/hobbyking/store/__662__HXT900_9g_1_6kg_12sec_Micro_Servo.html
they are pritty good servos. They are controlled using the 18m2. Later i have added 2 wheels to the gripper so that it can change direction while in the riding position.

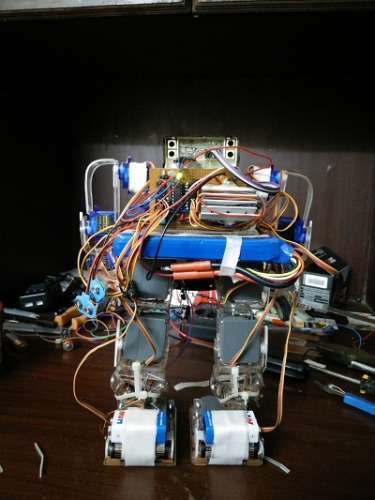
The main material used for constructing the robot is fibre glass sheet .It can be easily cut using a cutter and can easily be bended while heat is applied and it was readily available for me..
For the power supply had to make a 3A 5V converter. First i was using a 12v lead acid battery for power .Now i have bought a Li-ion battery of 11.1v n 3000mah. But its a bit heavy almost 260g. This causes the robot to fall a lot while testing the programs. Thats one big drawback for me.. :(
Now it weighs around 1.1 kg..
Experimental
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/linq-the-humanoid
