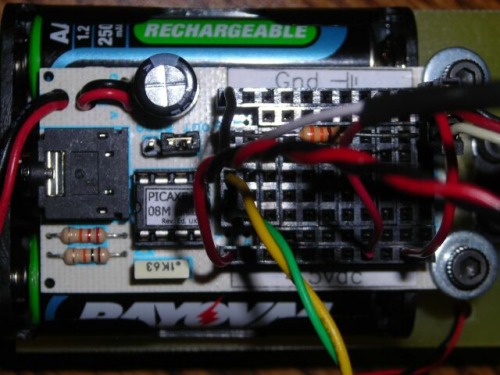
Here is my Less-is-MoreBot. Ever since I started using the Picaxe chips, I started to wonder how far you could take the -08M. I made this robot to squeeze about all I could out of a single -08M chip. The idea became the Less-is-MoreBot. Starting with the #AXE021 Proto board, I added female headers to make it more prototype friendly.
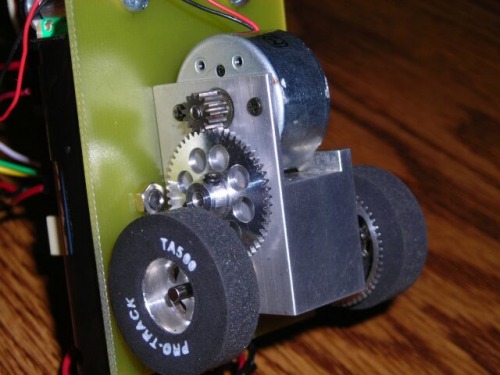
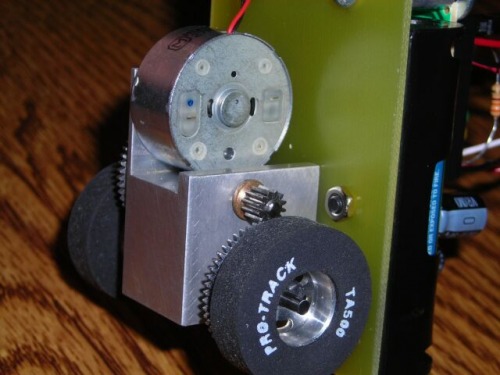
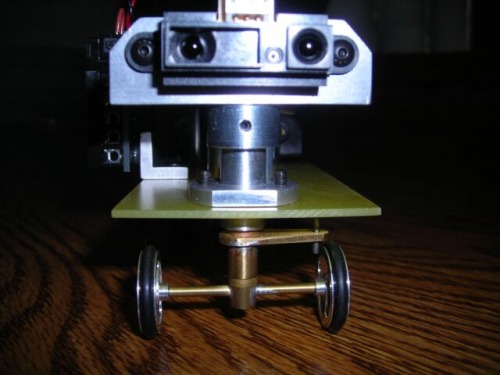
I had a good CD drive motor so it was used for to power the Bot. I made the aluminum gearbox at work using some leftover slotcar drag-racing gears. These are 64 pitch gears and available in pinion sizes from 6-tooth to 16 tooth and spur sizes from around 46 teeth to 62 teeth. You can get them from any slotcar track that features drag racing. The pinion gears have a 2mm bore and the spur gears use .093 inch bore. The double reduction gearbox has a 16:1 overall ratio. Tires are 1.0" diameter.
Motor control is FWD-Stop-REV using half of a L293D chip. This chip is mounted on a RK Education Motor Control PCB. I like this board as the size is 35mm square and has (3) mounting holes. Pretty easy to place almost anywhere. Screw terminals add to the ease of wiring and moving to other projects. This board is wired to the chip Pins 2 and 4.
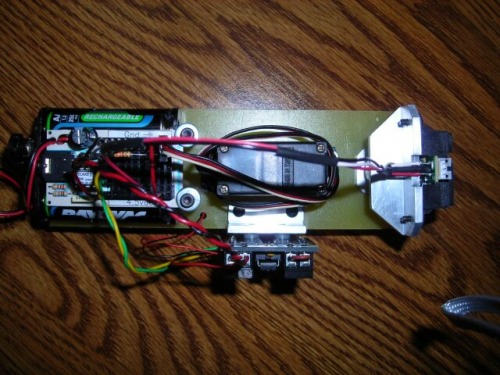
A Futaba standard servo is wired to Pin #0 thru a 330 ohm resistor. I use the servo to steer the Bot and also sweep the Sharp sensor. Some more slotcar parts were used for front wheels. I made the front steering from brass and aluminum tubing and sensor mount from aluminum angle. Steering is 45 degrees each way from center.
Object detection is the Sharp #GP2D120 sensor wired to Pin #1. Still have the Input #3 pin empty but I am thinking of something to add soon so that all 5 available pins are used..
I’m impressed - the custom I’m impressed - the custom gearboxes look very tidy, and judging by the video they run smoothly as well. Using the front servo to control both IR sensor scanning and front axle turning is also very clever.
@TeleFox - the gearbox worked well with the slotcar gears. They are precision cut and real quiet also cheap for the quality. I made an extra box for a future robot using the same type of gears.
@ Oddbot - I see why this bot reminded you of the skateboard... the program used 148 bytes so I had a good bit to spare. Will probably add a sub-routine to turn 180 degrees if IR reading is the same both directions.
@ Robologist - Had to put some thought into the steering/sensing device as I only had 1 pin left to do both.
08M rocks! Good to see another 08M fan. Nice bot. Good looking gears. I’m going to steal your “fill up the whole 08M proto board with female headers” idea for sure. Good tip!
Custom Gearboxes The gearboxes were machined on a Bridgeport mill from solid 1.0 x 1.0 aluminum bar stock. The axles are drill blanks and run in bronze bushings. I do the design work in a really large machine shop and I stay after work to make my robot parts. Now if we only had a laser cutter …
Glad to be of some help! I made this mod to another Axe021 board to control up to (3) servos or do anything else you would want thru the headers. Here is the schematic I used:
The part numbers shown are from DigiKey. Green lines are your jumper wires. Omit the 2x7 female header on this mod, they went to another design in this file.
Great looking and fonctionnal robot my friend. Love your gearbox built with precision and your front steering setup. Keep up the good work and thanks for shearing