

ok so this is the stalled K9 mark Pom, I have a Cubie Truck3 for the main brain so I can run the ROS on it. and that is where it stalled lol I have 4 vex omni wheels and vex motors. same setup as the other dual bots me and my Wife are building. I am going to use the turtle bot like one for a test bed for this one I hope. I'm more hardware type then software and that is my main problem. someday this will be running, it's the whole reason I got into computers in 1982 to build a K9. and this one is my 2nd attempt, the first got lost after some personal issues.
a little more information about the idea of my K9 Cubietruck as the main system, it is a dual core Arm a7 with 2 gig ram running Ubuntu Linux and I put a 60 gig ssd under the system board I am trying to learn how to get it to talk to Arduino Nanos via I2c, but I think I can only get ROS.org stuff to talk via serial interface, if that is the case I can use 1 Arduino as a master controller, and one or more as slaves to do the actual work. the whole idea is to sub process out as much as I can to leave the main brain free for thinking. just like we humans are designed, sort of. we don't think about walking / talking / movement. well we do, just not a main thought, subconsciously we do motor control / voice and balance. same idea for this robot except delegate the functions to Arduinos. I hope that makes sense. lol
update 20 sept 2014.
I printed up a bezal and mounted a 2.8" adafruit touch screen on the side.


10/14/2014 - I got the top panel completed. and test ( I need to retest because I am not using pins, just soldered the wire directly to the display now)

I am attempting to compile drivers for the side display to work on the Banana Pi. the one in there works fine with a Raspberry Pi.
I got that keypad all wired up with LCD. wasn't too hard to build. I also found an arduino lib for keypads, and it works great with my home made switch pad. The only hard part was the LCD is a cheapy so the manual ( only 1 PDF I found online) and seemed to be mis-labeled on the data pins. but I switched them just in case and it worked. I setup the arduino to make one of the switches a LCD on / off via a 2n3904 transister and an output pin, that worked better then I thought so now I can add a sleep timer on it.
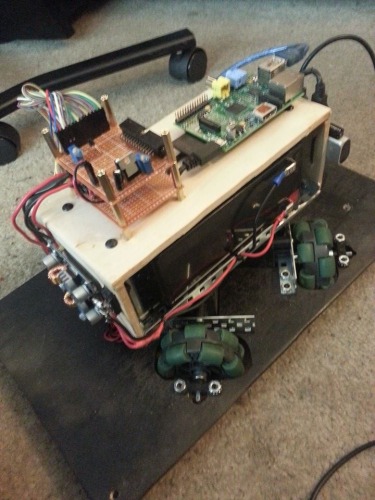
so, this is where I am at now. I made a wooden battery box, so I can mount parts to it. the Vex plate I had, none of the holes lined up wtih anything. so I went this route. I have some proto boards to act as interface to the arduino and raspi to other electronics. the bottom one on the picture is more of a power distribution board, the other is the top panel to arduino.

I haven't done much with this one. but I did get the eyes dones. 40 rgb led matrix, 120 leads bent and soldered not once, but 3 times. lol first time wrong leds. 2nd time the leads were too tall, 3ed was the charm. :D
https://www.youtube.com/watch?v=ZP-XSIdbA-k
------------ 11 / 5 / 2015 ----------------------------------------
I really haven't done much with this. but I made progress on the head movement. so here it is.
the platform is just a test bed, I didn't want to mess up the real body. I'm using 3 by mg996r servos, a joystick and an Arduino UNO to play around with the head movements,
https://www.youtube.com/watch?v=bfm7BTl5Enw
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/k9-mark-pom



