Added video. I know it's motion stinks.. But it is work in progress, I only made / show you the video because I find it interesting myself to sit and figure stuff out by watching it :)
Well at leat this time I have managed to make something that jumps.. Like crazy :D And that is the problem, it goes nuts!
It's late & dark now, so I cannot get it on video.. outside.. and trust me; one does not want to attempt it inside :)
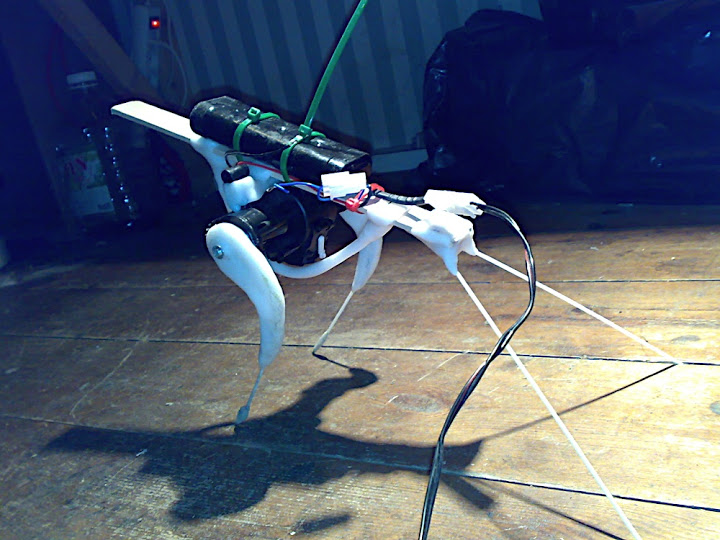
The "pins" are fiber glass, very springey, I found out the Polymorph is quite absorbing / dull as spring compared.
At the tips it has steel reinforcement, as it was getting shorter and shorter legs :)
The reason for the long stick in front is that I experiment with moving the battery / weight.
The motor is from an old RC,I have locked the axle, no dif drive.
More to come, and then better images, and video not made with my cell.. I guess :)
I'd REALLY whish I had a high speed camera, that would make analyzing the jumping SO much easier. This is too big and crazy jumping for any strobe-analyzing.
Ahhhhh - No Video ! you kill me! , your such a tease!
Instead of having it run, where analysis would be difficult - can you just record dropping it? It might be easier to try to understand what is going on and where a natural harmonic of motion is.
I don’t know where you are going with this but it looks like fun. rHex was pretty nifty for the simplicity of it, but I would guess a kangaroo actually can feel the best time to contract its muscles - rather than just blindly sending 100% duty into a rotary motion.
A kangaroo hits the ground after a leap - on impact the tendons and muscles stretch like springs and I would guess they can feel the appropriate time to apply “leaping” pressure
could you put switches on the feet so you uProcessor knows when its in contact with the ground?
I am holding final judgment until I see video! (But I love this series progress!!)
Those sensory switches need not be on the actual feet. Anywhere along the leg, where it can sense tension (flection) in the leg, would do. I took some X-rays of your leg and drew an extra tendant along the rear of the leg. This shows just one example of placing the sensor near the "hip joint".
In red is the tendant when the leg is flexed (has tension). In green the same tendant when leg is relaxed. The top of the tendant is not fixed in the left image.
In the detail image it is fixed to the joint. A levered microswitch is placed between bone and tendant. It takes up the slack of the relaxed tendant. In this position it would be sensing "airtime".
Analogue sensors would even be awesomer!
Man, I got to get me a real robolab! Too ... many ... ideas ... Must ... choose ... one!!!
Hey, what if instead of Hey, what if instead of motors turning all the way around, you could somehow have them as fast servos that just pop the bot up and forward?
Thank god this one isn’t so terrifying. Good aesthetic though – the legs look like a bird’s muscular legs. Looks like you need another set of fiberglass “antennae” on the other end to keep it from flipping over. Looks like good progress though.
The flipping over is like ketchup on your pasta running down to the table. One could of course (as you suggest) make an extra plate to pick up excessive ketchup.
I like ketchup, but I think I will try just to learn to control the amount
i like the idea of it but i would have make it take steps for the motion… however making it jumping around like a crazy person is way much funnier… i have already some prank i could do with the help of that robot lol…
i noticed that the legs power is different from each other. are the motors of the same power or is a leg heavier than the other??
The motor is from the back The motor is from the back of a (big) RC-truck, and it had differential pull, that I have locked with some hot glue. However it is not that locked, it’s crap!