

UPDATE: Progress on NRF24L01 code for working between PC, Hub, and Robot.
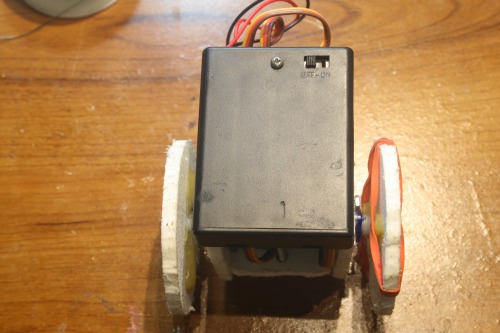
So, here is my attempt at a swarmie build. Not much here yet, simply a personal build log until I get an iteration cheap enough, then, I'll start incorporating them into the Overlord project.
I have to bow to Bajdi; those little NRF24L01 take a lot more brainpower than simple ole' Bluetooth. I tried for some time to write my own code that would send and receive bytes to or from the other node. After a little of hair pulling I gave up and started reading other's code. I came across Robvio on the Arduino Forums who had some rather nifty code that I left nearly intact.
#include <SPI.h> #include "nRF24L01.h" #include "RF24.h"RF24 radio(8,7);
// Radio pipe addresses for the 2 nodes to communicate.
const uint64_t pipes[2] = {0xF0F0F0F0E1LL, 0xF0F0F0F0D2LL };//for Serial input
String inputString = “”; // a string to hold incoming data
boolean stringComplete = false; // whether the string is complete//NRF Packages
byte SendPackage[32];
byte ReceivePackage[32];
boolean sending=0;void setup(void)
{
//
// Print preamble
//Serial.begin(9600);
radio.begin();
// optionally, increase the delay between retries & # of retries
radio.setRetries(15,15);
radio.setPayloadSize(32);
radio.openWritingPipe(pipes[1]);
radio.openReadingPipe(1,pipes[0]);
radio.startListening();
//radio.printDetails();
}void loop(void)
{
//check for NRF received
NRFreceive();
//check for Serial received (or filled by NRF)
Serialreceive();
}void serialEvent() {
Serial.println(“Event”);
while (Serial.available()) {
char inChar = (char)Serial.read();
inputString += inChar;
if (inChar == ‘\n’) {
stringComplete = true;
}
}
}byte NRFsend(String NRFPack = “”){
NRFPack.getBytes(SendPackage, 32);
radio.stopListening();
radio.openWritingPipe(pipes[0]);
radio.openReadingPipe(1,pipes[1]);
bool ok = radio.write(SendPackage,sizeof(SendPackage));
if (!ok) Serial.println(“NRFerror”);
radio.startListening();
unsigned long started_waiting_at = millis();
bool timeout = false;
while ( ! radio.available() && ! timeout )
if (millis() - started_waiting_at > 200 )
timeout = true;
if ( timeout )
{
Serial.println(“NRFerror”);
}
radio.openWritingPipe(pipes[1]);
radio.openReadingPipe(1,pipes[0]);
}void NRFreceive(){
if ( radio.available() )
{
//byte ReceivePackage[32];
bool done = false;
while (!done)
{
done = radio.read( &ReceivePackage, sizeof(ReceivePackage) );
delay(5);
}
radio.stopListening();
inputString = ((char *)ReceivePackage);
stringComplete = true;
radio.write( “1”, 1 );
radio.startListening();
}
}void Serialreceive(){
if (stringComplete) {
if (inputString.startsWith(“T:”)) {
NRFsend(inputString.substring(2));
}
if (inputString.startsWith(“S:”)) {
Serial.print(inputString.substring(2));
}inputString <span style="color: #333333;">=</span> <span style="background-color: #fff0f0;">""</span>; stringComplete <span style="color: #333333;">=</span> <span style="color: #007020;">false</span>;}
}
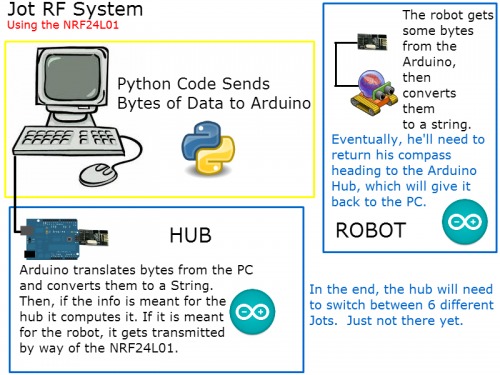
The way this code works is much like a software and serial simulated Bluetooth module.
To send serial data it goes like this, you type something with a prefix code, T for transmit and S for serial print, and ending with a newline character (\n).
For example, typing the following in the terminal on module A:
- T:S: My message \n
Will send “My message” to the other module B, then, it will print “My Message” to serial line on the module B.
If you type,
- T: My message \n
This will transmit “My message” from module A to module B, but it will not be printed to the serial line on module B.
I’ll let you guys look the code over and tell me if I can improve it for what I’m doing. Right now, I’ve tested it with some basic Python code to send a serial message to my hub (Arduino Uno and NRF24L01), which relays it to the robot (Arduino Pro Mini and NRF24L01).
Cost to build
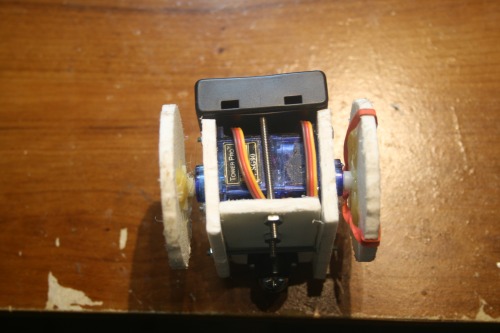
- Tower Micro 9g Servo x 2: $5.22
- Ball Caster 1/2" Metal x 1: $3.65
- Funduino (early Arduino Pro Mini): $4.89
- AAA x 4: $1.44
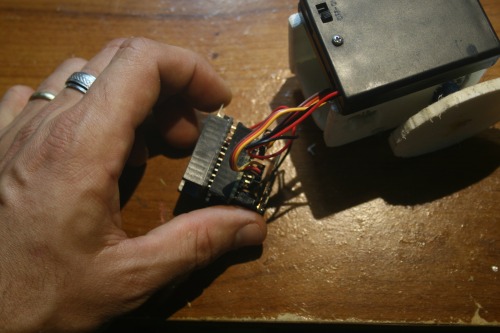
- NRF24L01 x 1: $1.31
- Compass (HMC5883L): $2.37
- 2-56 Threaded 2" Stud x 2: $1.00
- 2-56 1 1/2" Screw x 2: $.17
- 2-56 Hex Nut x 6: $.23
- AAA x Battery Case w/ Switch: 1.05
- Helper Board:$1.53
- SOT-23-5, 3.3v, .30mA LDO Voltage Regulator x 1: $.57
- 1uF 0805 ceramic capacitor x 2: $.20
- 0805 4.7k resistor x 2: $.03
- 0805 330-860oh resistor x 1: $.03
- 0603 LED (red, green, yellow) x 1: $.09
- Right Angle header x 8: $.05
- Straight Header x 26: $.08
Total (approximate): $23.95

Videos
Designing the build in Tinkercad:

Converting Tower Pro 9g Servo to Full Rotation for Motors:

Cutting Out the Build:

Putting the Pieces Together:

Making the Little Warmie Helper:

This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/jot-test