

Jon* Or Something (for people that seemingly have issues with diction of spells that will bring about their doom true names) or
YAPBATOINTMBISHABOWIS AIWPEURITJOS --(Yet Another Pi Bot Although This One Is Not Tracked Mostly Because I Still Have A Bunch Of Wheels In Stock. Also I Will Probably End Up Renaming It To Jon Or Something)
* an homage to a lost warrior of one of the true faiths.
Motivation:
From sometime now I've been wanting to do a sort of remote presence bot just to check out what's happening at home (from work, or some other place), and or nag the cat :P After (or even before) getting my hands on a raspberry pi, it's fate seemed obvious, given the ubiquitous nature of these types of build using the raspberry pi I would have a lot of my work cut out for me. I don't even any intentions of innovation or originality, just want to go through the paces (but with as little fuss as possible) and end up with a pretty pi bot myself.
Objectives:
- Make something out of the raspberry pi
- Use up my geared motors/wheels stock
- Make a web controlled wifi-lan linked "surveillance" robot
- Host bot publicly on the interwebs
Optional:
- Add sensors and autonomous mode & assorted 'fancy' stuff?
Roadmap:
- Acquire/obtain need parts
- Setup wireless connectivity
- Setup webstreaming properly
- Design & build *duino/motor controller intermediate
- Put the *duino & rpi talking with each other
- Design, assemble chassis / put parts together
- Enjoy a work well done OR Cry and whine about things not working! [ended up apathetic of the outcome]
- Declare victory over birdmun!
- Pimp it up & generaly improve it where feasible!
- Add proper pronunciation audio file to the project page.
- Complete!
June, 3rd 2013
---------------------------
After some though I decided that this project is complete, as in I'm not going to add any more features to it. In the meantime the big power bank (20,000mAh) did arrive... but I felt short of expectations (even though I was expecting the to obvious be under the rated specs). The increased battery weight, and output voltage under 5V and the voltage drop across the L293D turned it a very slow mover. All the more I've never completely solved the motor un-eveness (need to finally use wheel encoders -- and a niftier fabricated h-bridge).
Thus I shall commit it to Termination, Salvage & Rebirth as parts of other projects (recall that YA2WDNSOSBBALABMHAMF had already partially been reborn with the making of this project :) ). It was fun, I've managed to learn a few more new things, pushed birdie (a little) "off the nest" and into publishing his first bot... :P
Seeing that I also I can't afford to buy a raspberry pi per project, the salvage operation will be happening very soon. So, farewell YAPBATOINTMBISHABOWIS AIWPEURITJOS I'll see you around (other future projects :x)
April, 16th 2013
---------------------------
So, I guess I won... yet Mr birdmun thwarted my sense of victory with his condescending and passive-agressive 'throw of the towel'. Thank you very much Mr. birdmun your evil plans despite being very clear they have put me on a foul mood. :|
Regardless,
Jon can now be found and controlled at:
http://livebots.cc/Robot/View/58
however only expect him to be "awake" within the 21:00 (9 PM) - 02:00 (2 AM) GMT+1 (Summer time) time interval, and not the during the whole range (or every single day). Specific time sub-intervals will vary according to personal & battery availability. I'm still waiting for the 20,000 mAh power bank to arrive in the mail. That I hope will greatly increase the runtime of Jon. Also, I still have some tweaks, improvements and pimping up improvements planned so I might need some of the usual LIVE time to actual perform said improvements and thus depriving Jon from being LIVE.
Right now the controls are... reasonable. Since I'm not using wheel encoders I'm using the dreaded delay(); to control how much Jon moves. So far, both counter-clockwise & clockwise spins are approximately 90º where forward-[direction] and reverse-[direction] are (very) roughly 45º turns (re-alignments). Reverse is fairly straight... however forward can either be fairly straight (or present an accentuated drift to the rightside).
April, 14th 2013
---------------------------
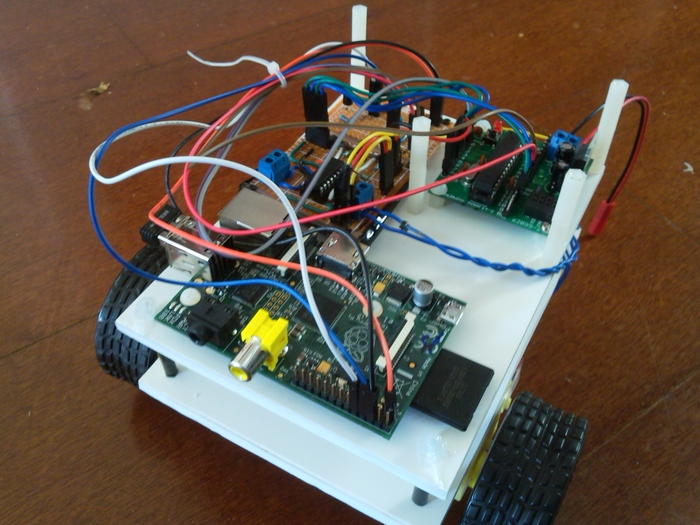
Seeing that everything seemed to be working, I started building the chassis (designing-as-I-went). Nothing fancy, just a 2 1/2 retangular decker. Since that I'm scarse in standoffs, and the few I have are nylon ones I decided to use nails and drinking straws (cut 3 cm in length) as standoffs. (also was inspired by Gabriel_f into do the following animated gif)
The expanded PVC board I use was recycled from a "patch-up" project where I failed to take the correct measures (consider the bending arc of the board). Motors and wheels (even the caster) where recovered from dearly parted YA2WDNSOSBBALABMHAMF. Each nail has 2 concentric pieces of drinking straw. Mounting the boards atop the second deck was easier than I predicted.
See the following top-down "aerial" photo for a board walkthrough:
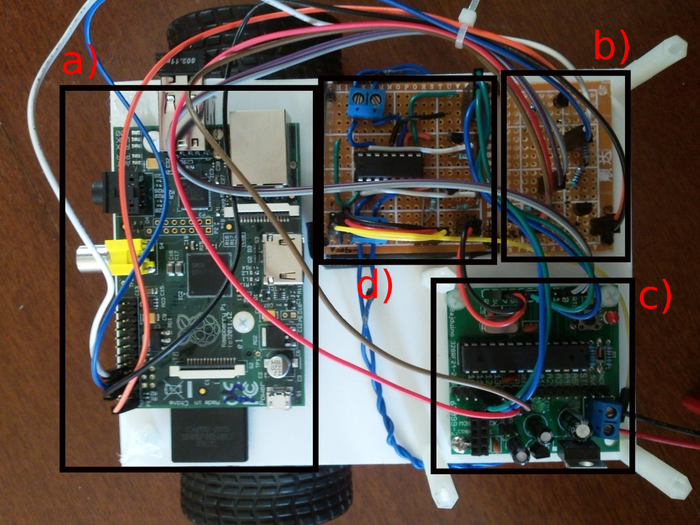
a) Raspberry Pi (has 4Gb Kingston SD card running the modified Livebots Raspbian distro + WiFi dongle plugged in).
b) A level shifter board to interface the Rpi serial TX/RX pins with the *duino's serial RX/TX pins.
c) The Bajduino 328RF24 rev 2, a nice small footprint board for 28-pin atmega designed by Bajdi.
d) Motor driver scavenged from YA2WDNSOSBBALABMHAMF and originally built according to Dan M's schematics.
Also I've already completed the setup of this bot at the Livebots website, and it already sports basic navigation and camera panning. However it is still NOT LIVE because I need to add bumpers and reduce speed it's speed... because... well I know how people are *frown*
April, 13th 2013
---------------------------
Today I've finally settled on a nice basic proof-of-concept sketch for the *duino ( which I intend to fancy up once I win the challenge against birdmun :D ). Also I now can control the *duino periferals (motors & pan/tilt servos) from the rpi just by sending strings with pyserial. Albeit I still need to "weave" it together with the livebots.cc API. Physically the Rpi and the Bajduino 328RF24 rev 2 are connected via TX/RX pins with a level shifter interfacing them (boards show on April, 11th update photo). So far it all seems to work without any problem. Next up, design and assembly of the chassis and putting all the parts together in it and then finally putting it LIVE. :D
April, 11th 2013
---------------------------
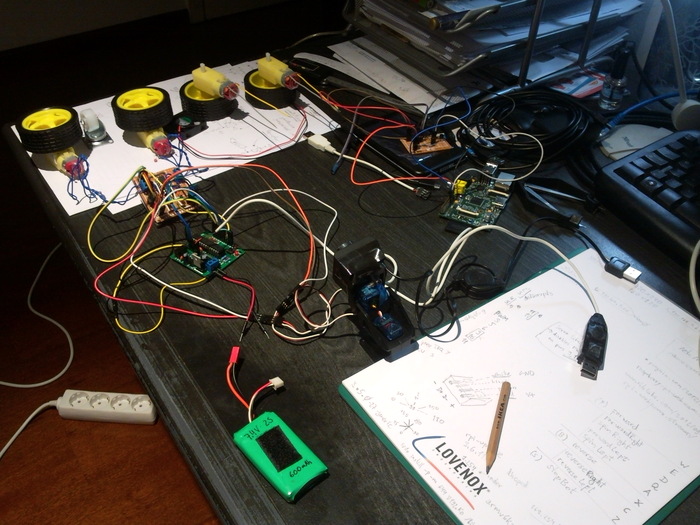
After some consideration and some tests I've decided to go with with a Bajduino 328RF24 rev 2 (designed by Bajdi) as my *duino based board, and for motor driver the L293D perf board I had made to YA2WDNSOSBBALABMHAMF (my first bot) and scavenged it upon its demise. I tried a more recent iteration of it, where I designed and etch a board myself, but it gave no life sign at all... :( so for now I go with what works. Also the *duino code has been partially scavenged from my first bot (the wheel moving routines). Soldered a little level shifter on a perf and got a set of double axis yellow case geared motors ready to roll (i can easily install encoders on these ones). On the picture below you can also see a solar charging able 5000mAh rated power bank, it's one of my options to power the pibot, however I'm still waiting on a 20,000 mAh rated one to arrive (should give me a little more runtime). My next step will be making the the rpi "talk" with the *duino.

April, 7th 2013
---------------------------
Initial post. At the time of this writing I already toyed around a bit with my raspberry pi and setup up the wireless connection (although could only do it in a couple of distros despite all the kernel & modules compilation that I've done -- currently I'm using the Livebots distro). Also I already managed to stream video out into the intertubes... however somehow mjpg-streamer is still being unreliable only working a few minutes at a time. I'll either find why and solve it... or I'll just put together a dirty script to turn it back on whenever it fails...
Spies around the place controlled by sneaky interwebbers
- Actuators / output devices: 2 geared motors
- Control method: remote control via web
- Operating system: Linux
- Programming language: Arduino C, Python, Bash script
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/jon-or-something

 And c’mon try it, it’s not that hard to read
And c’mon try it, it’s not that hard to read 
