

This is my second robot: Jani-6 (named after Johnny 5)

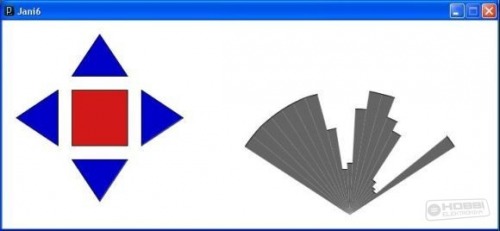
It is a Bluetooth remote controlled robot, which is scanning a Sharp IR distance sensor with a servo, and displaying the picture on the PC in Processing (LINK). The robot can be controlled with icons in Processing too.
The AVR code is controlling the DC motors, rotating the servo to a given angle, measuring the Sharp sensor value, and sending the servo angle data and the sensor value to the PC via Bluetooth. (ATmega8 @ 7.372800MHz crystal, serial communication speed: 9600 baud)
The AVR code (Jani6.c): LINK
The Processing code is reading the servo angle and distance sensor values sent by the AVR. Linearizing the measured values of the Sharp GP2Y0A21YK sensor to get the distance of the objects front of the robot (LINK). And sending commands to control the movement of the robot.
The Processing code (Jani6.pde) and two videos at the bottom of the page: LINK
Bluetooth remote controlled robot with scanning Sharp IR sensor
- Actuators / output devices: Tamiya twin gearbox
- Control method: remote controlled via Bluetooth
- CPU: AMTEL AVR ATMEGA8
- Operating system: windows XP + Processing
- Power source: 4 AA batteries + 9V battery
- Programming language: winavr
- Sensors / input devices: Sharp IR Range sensor on servo
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/jani-6