i am new and i want to build me a rover-robot using the lynxmotion A6WD2 kit. i already googled a lot and searched for parts and now i have some questions before i buy all the stuff^^ i want to use the botboarduino as controller, does it have enough pins to realise my rover?
i want to have a pan and tilt with a camera(using raspberry pi) on my rover, can this pan and tilt also be controlled with the ps2 controller? so with the left stick driving and right stick moving the pan and tilt?
can i connect all 6 motors to one sabertooth 2X12 R/C ?
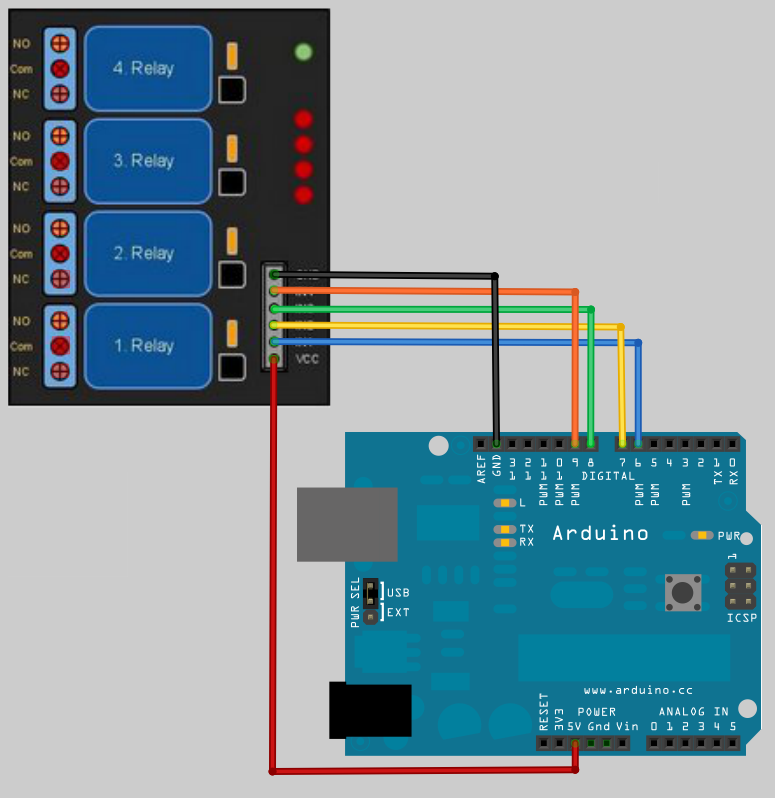
and i also want to use a 4-way relay hobbyist.co.nz/sites/default … _step2.png to power on and off lights on my rover when i press a button on the controller. can i connect this relay to the botboarduino?
and one more question: the pan and tilt servors will be powered using a 6v battery. And on the botboarduino manual it says i will need a extra 9v battery for the botboarduino. can i also use a 7.2v battery because it would have much more capacity (for maybe powering the pi with 5v)?
Now you’re merging two different controllers; an Arduino with a Pi? It’s easiest to start with one; the BotBoarduino can handle the driving and pan/tilt.
Yes, that’s the suggested controller.
The link you provided shows it being connected to an Arduino (and the BotBoarduino is also an Arduino), so yes
You would be best to use a 12V battery to power the motors and the Arduino, and a separate 6V pack for the pan/tilt. However, if you’re using Hitec 422 servos and not putting them under too much load, then you may be able to get away with using just the 12V pack and powering the servos directly from the Arduino (keeping in mind that the Arduino can’t provide mcuh current from its pins).
I would never recommend using Hitec 422 servos for a pan/tilt. I’ve tried using these in pan/tilts, and have always had to change them out for better servos. If you are planning to raise any sort of load, you need something stronger for a tilt servo. I always use at least HS-475/485 servos for my pan/tilts, and sometimes I go with an HS-645 for the tilt servo, depending on what I plan to lift.
You may be able to use a 422 for a pan servo though.
ok then i think the 485 servo would be the best choice for me
sounds like a good idea, when i connect the 12v battery to the arduino and sabertooth i have to connect it using a parallel circuit like this? lehrer.uni-karlsruhe.de/~za1 … mehra2.gif
You only need to split the power from the battery (making a small custom wiring harness might be easiest).
You only need a parallel circuit when you use two batteries.



{kind=link}

{kind=link}