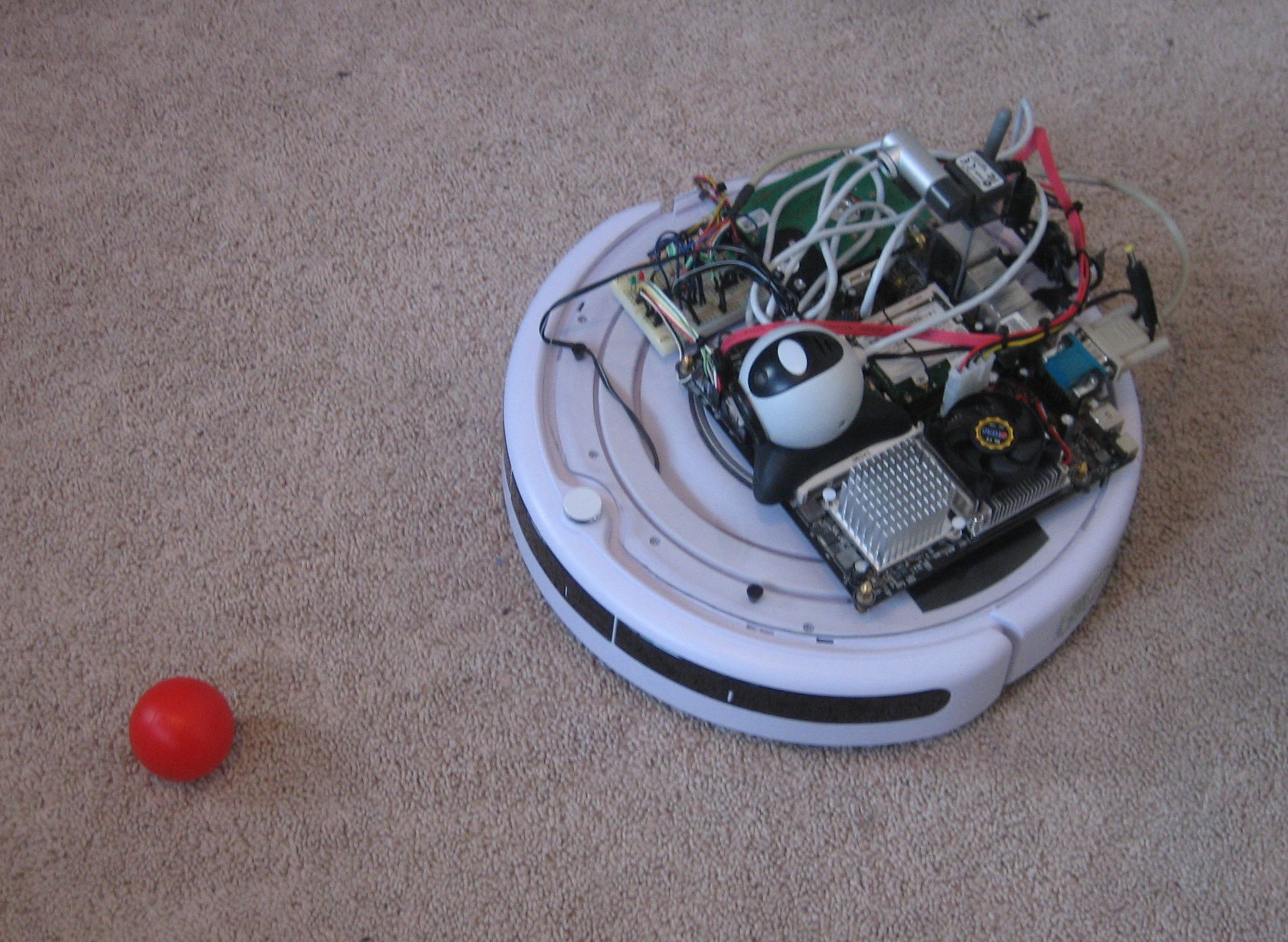
This really was just built to learn how to program C# robotics applications. A goal is to have some type of object tracking via the webcam, currently it uses just the roomba standard sensors for navigation. Outdoors I have a GPS module that I will be testing in a local tennis court once summer comes back and the snow is gone....
This is a picture of the SCI control cable, it connects to a standard serial port TTL 5V, (uses a max232 for the PC connection), and has one special control line to wake up the roomba.
This is a power wire added to a remote switch as there is no longer access to the main top power button. I will actaully be adding a small cable assebly to bring out the dock, clean, demo and lights to a control board ontop of the robot.
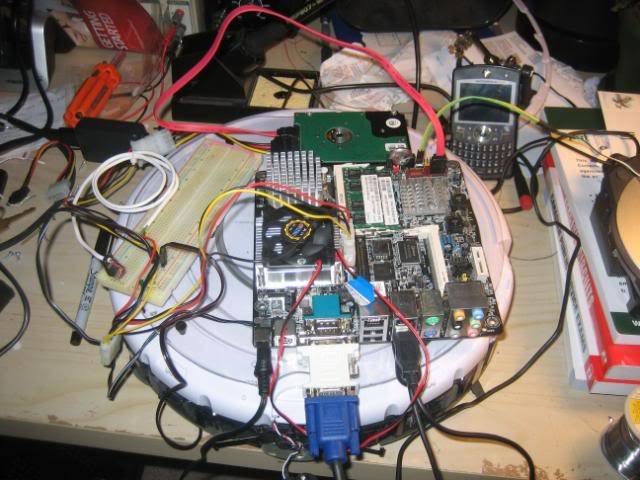
It looks to me like you have a whole PC, a disk drive, a wi-fi hub and a breadboard sitting on top of your vacuum? Wouldn’t it be cheaper to employ a cleaner; and s/he might also be able to clean the stairs?
I have always been interested in the laptop controlled robots. The C# GUI you made, was it made by you? What type of communication did you use if it is remoteley operated, and do you think any code could be supplied, atleast the blob recognition one? That looks sleek.
Edit: Holy ■■■■■■ nevermind, thats the computer’s motherboard there!! I have never seen something like that, where someone actually used an onboard legitimate computer to control the bot, as opposed to a remote laptop or a palmtop or something on top. VERY impressive mate, loooking forward to more details/bots!
iRobot Create… I’m actually familiar with the create series of robots… The cost for one is higher than the cost of the Roomba 530 robot if you want something useable on a day to day basis.<o:p></o:p>The Create is $129.00 with no automatic charge base, no rechargeable battery pack, no brushes or cleaning components, it is also based on the older chassis designs which are prone to problems and as well the older units also have far less sensors. I see no value for the average hobbyist to purchase the create, even if budgets are an issue you can buy the Roomba 530, sell the battery pack, base station and brushes/cleaning system on Ebay for far more than the difference between the two units.<o:p></o:p>IMHO the only place for the Create is in an educational environment, where the schools educational discount and buying power of purchasing 10+ units makes it a much more affordable robot than say purchasing 10+ 530 Robots. For the home and general hobbyist the 530 is a far better choice. You get a much more capable robot, can learn about and play with far more sensors, have the ability to work with the self charge base, and don’t have invest in Energizer stocks to afford the AA batteries.<o:p></o:p>
Thanks for your reply. I hope to post a more detailed buid document soon (something that is written more clearly!) I was just trying to get it posted for everyone to see the progress as soon as possible.
As for the computer on a robot, I can take no credit for a uniquie approach to putting on a computer on a robot. The VIA series of pico-ITX motherboards have been appearing inside of robots for some time now, and myself i’ve had a netbook running on this Roomba, as well as I’ve seen some netbooks on Roomba’s and NXT robots over the past few months, which is essentialy what I have minus the sceen/keyboard.
A comparison? Do you know of some sites where some of this info is listed? I’ve got an apprently second generation Roomba Red from a garage sale, and was interested to see a comparision between models, such as which robot has what sensor, etc. Also any specific pointers to what mechanical issues exist between models. I saw mention of an IR sensor for remotes and additional dirt sensors for the new 5xx series, but not much more info yet.
for those who want to start, but dont want to build everything by themselves- there is an option to program Roomba (or Create) using .Net (or any other programming language)
Have you readmy comment on using the right mcu? If you don’t know how to choose the right 8-bit mcu yourself, it will be impossible to come at least half this far.