

Thats one of the best looking quads I have seen. Nice work!
thank you for your comment. really appreciate it. 
the plan was ‘as you may know’ to add vacuum formed shells but at this point that part of the project has been put on hold. 
thanks again.
jonny
Wow! 8) That’s awesome! It looks very nice indeed.
When the coxa are centered the code should work fine for rising the body. Remember to calibrate all legs correctly
Looking forward to it!
iv compiled the code on the atom and all worked ok, but i havent connected it to the SSC yet 'just waiting for a 6v battery to arrive for the servos. ordered it last night.
nothing special, 6v 1600mah NiMH for testing.
i think i have calibrated the legs right, but i will double check once i get things together.
Is the trick to transform from global to local coordinate for the tilted coxa?
More important info here: Weight (w/out batteries, or upper body) = 3lb 5oz
http://i531.photobucket.com/albums/dd355/innerbreed/outputtest1.jpg
ill post the code once iv calibrated it correctly. if you are still willing to help with the tilted coxa part i would really appreciate it.
OK, your quad has a head, but it’s in the center of the 'bot. Very neat design! However not anthropomorphic! Being able to move the head (left to right I suppose) would probably have less effect on the COG for your 'bot.
I was actually thinking more of Felix. but I’m probably on the wrong thread (again) for that.
Alan KM6VV
yeah i miss Felix too.  come on Zenta!!
come on Zenta!!
the inverted servo horn you see on the top obviously attaches the head “Well body”! there will be turrets etc on the top.
Xans code, with Zentas balance calculations will work together to counteract the COG as it falls away from the centre. i hope.
**Waiting for my batterys is making me bored!**http://i531.photobucket.com/albums/dd355/innerbreed/100_1095.jpg sizing them up for “round one”

{kind=link}
Woah. What’s that thing on the left? Did you make that? Or is a a toy…
It’s a toy. I can’t quite remember the name. It’s made by WowWee.
ROBOQUAD! its my sons.
Like father like son… 
Are you going to build a skin for the quad eventually or no?
ok batterys charging…
just a small [size=75]small [/size]update.
this is the quick connect im using for the battery!
http://i531.photobucket.com/albums/dd355/innerbreed/100_1103.jpg
http://i531.photobucket.com/albums/dd355/innerbreed/100_1102.jpg
[size=200]Feedback?[/size]
Good idea! the wire should stay in there better. 
i will be doing this for all the wire connections for that reason.
plus it will save straining the terminals being tightend everytime the wires come out. thanks
Hi Innerbreed,
I’ve never tested it but I’ve read somewhere that a hex easy draws up to 12Amps. Making this a quad and doing really easy math it will end up using about 8Amps? I don’t know but having 8 amps running though that… I don’t know. It just doesn’t feel ok.
Why don’t you use a tamiya (B15 & B16) or T-connector (B1 & B2)
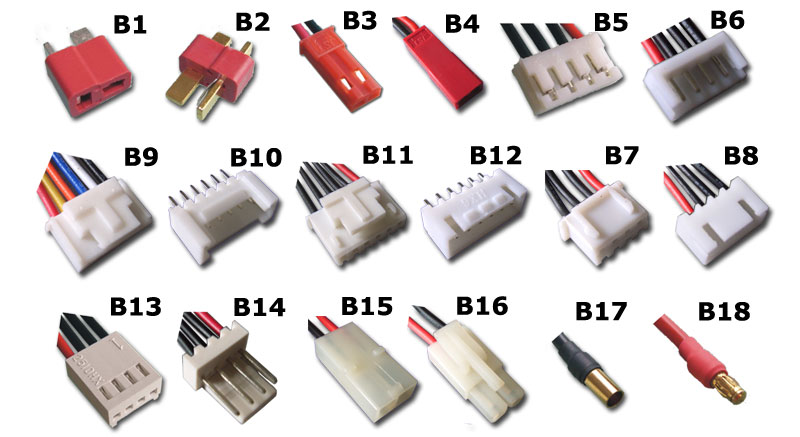
I’m using the tamiya connecter since the T-connector was sold out
I know they both are bigger but also more suitable for the amount of amps.
Xan
hi. yeah i am testing different options for the pwoer at the moment.
and i have noticed the promblems with not getting enough current. think its more to do with the battery i ordered.
6v 1600mah NiMH.
i have good power for about 5 mins. then it starts to look drunk!
having said this, im having problems with the code:
i have configured the legs correctly and im using the SSC-32 registers,
but when i initiate (power up - START) the legs seem to move into an in-line configuration. eg:
http://i531.photobucket.com/albums/dd355/innerbreed/100_1114.jpghttp://i531.photobucket.com/albums/dd355/innerbreed/100_1113.jpg
it should be like this:
http://i531.photobucket.com/albums/dd355/innerbreed/100_1071.jpg
also the femur servos are moving the legs up instead of being paralell with the ground like in the phoenix setup.
like i said the leg configuration is correct.
the code itsself works and the IK looks ok at the moment, but intill i sort these problems i cant be sure!
any help will be greatly welcomed.

Seems like 1600mah 6v NiMH should be plenty of power. what is the overall weight?
My quad is just now standing up (1500s), but I haven’t left it standing for very long. I suppose I should try that. Do you have a good DMM that you can use to monitor the voltage to the servos?
Can you split up the loads (1/2 servos on one battery lead, 1/2 on the other) by opening a jumper, and using two battery feeds? (If I recall correctly).
Your stance is quite a bit higher then mine. Might take more current?
Humm, maybe the curved tubing you used could work as a neck. Is it SES stock? Otherwise, where did you find it? bending it myself would be a chore!
Alan KM6VV
P.S. I got a few pix up of my quadruped start:
i have no way of monitoring the voltage etc.
splitting it and having two batterys would be a nice way to overcome it but i need to keep the weight down. its about 3lb 5oz at the mo. due to init prob i havent got it standing. only powered it up on a stand… (cd spindle)
the tubing is not ses. i couldnt find any tubing ob that dimention so i just got a good deal on ebay for some and also ordered a tube bending spring to bend the pipe. i used a disc break for a car to bend the tube round. the arc was perfect!
took about 30 sec’s.
spings are cheap too. get internal springs not external!
You need to get some test equipment! My 'scope went down, and I’m like blind! Good test equipment is always a good investment.
I don’t know my weight yet.
I’ll keep my eye open for some good small tubing, and a bending spring. but not too much effort to add a neck and head at this time. I think I’ve seen a lot of this thinwall aluminum tubing used for Ham Radio antennas.
What init command are you using for the initial configuration?
the PO (?) command? If the legs are correct at power-up, and then fade, then it almost has to be power-related. Does your processor reset?
Alan KM6VV