

What is a space rover
A space Rover is a robot which is capable of moving over a rough and difficult terrain and greater information based on what task the robot has been made for
The objective may be :-
1 Collecting samples from the surface
2 Search Operations
3 Looking for life forms and so on...
Or like in this case….
A rover Capable of overcoming the difficult rough terrain and clicking pictures or taking videos of the planet surface while controlling its own movoment and simultaneously calculating the distance it travelled..
PARTS USED:-
---------------------------------------------
USB Camera x2
Ultra Sonic Range Finder x2
60 rpm BO Motors x6
15kg-cm trq Servo motors x19
Arduino mega x1
Raspberry pi x1
Lithium polymer battery (5Ah, 20C) x1
Lots of Servo brackets

Though the design of a six legged hexapod robot is very complex, we tried to make it as simple as possible. There is an animation of our concept design of the rover.

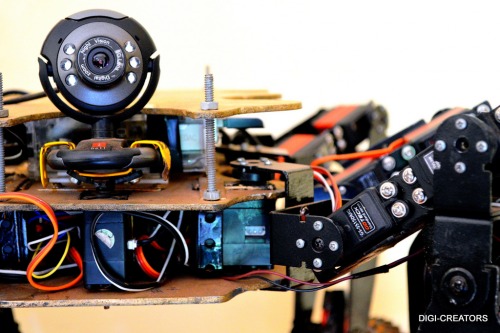
We used Alstone Hybrid Board for making the body of the rover, seven servos are attached to the body, six for the base of the legs and and one for the movement of the cameras. Two layers are made for holding the components, at the bottom layer we places the Arduino so it can easily connect with all the servos.

We used Servo brackets and alstone board to make the structure of the legs. Servos are attached by only using servo brackets. Apart from the base servo there are two servos, and a bo-motor for the wheel giving it 4 DOF on each leg.
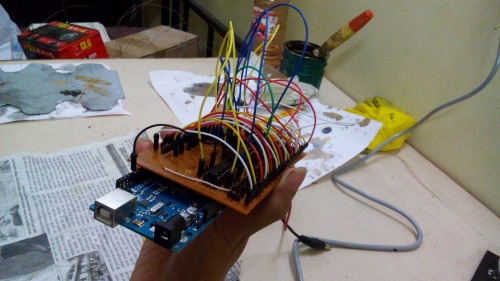
We developed an arduino shield for our rover which can drive 19 servos and 6 moters simultaneously, For driving the motors we used the motor driver IC L293D, three motor driver was needed as we had to control 6 motors.

There is a video of the rover just after assembling all the legs with the base and the camera, any connection was not made yet Then the connection of all the servos and the motors with the Arduino shield, and the camera was attached with the front servo,

After assembling of legs and base, connecting all servos to arduino, we used some test programs to see how it is reacting, In the test program of walking it is clearly observable that the speed of the servo is very high, and the movement is not smooth so it was clearly not the way we wanted. To solve this we had to control the speed of the servo which was very difficult in normal hobby servos if we want control more than one servo simultaneously.
Walk, roles, click pictures
- Actuators / output devices: servo, BO motors
- Control method: Laptop via simulink and joystick
- CPU: Arduino Mega, Raspberry Pi
- Operating system: Raspbian Wheezy
- Power source: 2-cell Li-po 5, 000mAh 20C
- Programming language: C++
- Sensors / input devices: camera, Ultra Sound, accelerometer
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/insight