

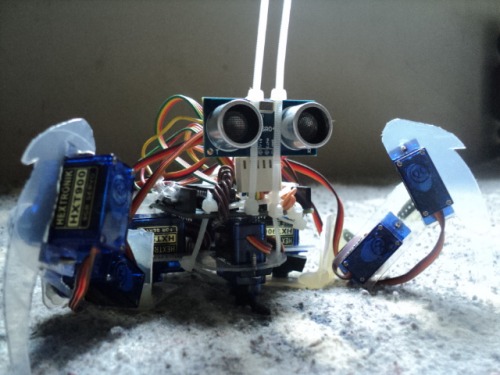
Insect with artificial intelligence He is able to avoid obstacles less than 30 cm, this is the first robot I built in my life, I am very pleased with the result.
The inspiration to build this robot came when I was looking for some examples on google, then I found the "letsmakerrobots.com" and soon I began to browse the site found a quadruped robot that caught my attention, "Small quadruped robot" from our friend "studikasus" thereafter decided to initiate the construction process. On the website "mercadolivre.com.br" did the purchase of servo motors, ultrasonic sensor and microcontroller (arduino), so far so good, but the biggest problem was finding a material for the construction of the robot body, its parts and claw , forearm, etc ...
The solution I found was to cut out a large plastic bowl, the material has served me well rsrsrsrs, flexible and easy to work but at the same time rigid enough to hold the servo motors and move the robot.
Regarding the code started adjusting movements of the legs without the ultrasonic sensor initially, that part was easy and painless, but when I decided to implement the ultrasonic sensor appeared some problems because I had never done it before.
1st problem: I noticed that the sensor was responding normally but the legs were not behaving as they should due to sensor ... (movement disorders).
I tried, tried, tried ... percibi and I was using only one variable in the code to account for various servo motors, so I decided to write a servo for each variable within a condition "if" legs and back to work as I expected! lol (kk curious)
(PORTUGUÊS) A inspiração para construir esse robo veio quando eu estava procurando no google alguns exemplos, então encontrei o "letsmakerrobots.com" e logo que comecei a navegar no site encontrei um robo quadrupede que me chamou atenção, o "Small quadruped robot" do nosso amigo "studikasus", a partir dai resolvi dar inicio ao processo de construção. No site "mercadolivre.com.br" fiz a compra dos servo motores, sensor ultrasonico e do microcontrolador (arduino), até ai tudo bem, mas o problema maior foi encontrar um material para a construção do corpo do robo, suas partes como garra, ante-braço, etc...
A solução que encontrei foi recortar uma tijela grande de plástico, o material me serviu bem rsrsrsrs, flexivel e fácil de trabalhar mas ao mesmo tempo rigido o suficiente para segurar os servo motores e movimentar o robo.
Com relação ao código comecei ajustando os movimentos das pernas sem o sensor ultrasonico inicialmente, essa parte foi rápida e tranquila, mas quando resolvi implementar o sensor ultrasonico apareceram alguns probleminhas pois nunca tinha feito isso antes.
1º problema: percebi que o sensor estava respondendo normalmente porém as pernas não estavam se comportando como deveriam devido ao sensor... (movimentos desordenados).
tentei, tentei, tentei... e percibi que eu estava usando apenas uma variável no código para dar conta de vários servo motores, então resolvi escrever uma variável para cada servo dentro de uma condição "if" e as pernas voltaram a funcionar como eu esperava! rsrs (curioso kk)
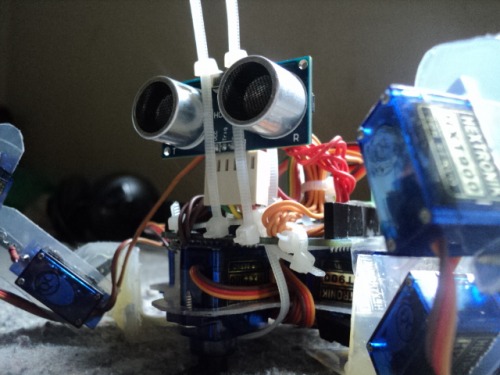
Navigate around via ultrasound
- Actuators / output devices: 12 Servos
- Control method: Autonomous.
- CPU: arduino 328
- Operating system: no operating system on the ATmega controllers
- Power source: 9V+6V
- Programming language: Arduino C
- Sensors / input devices: HC-SR04 ultrasonic sensor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/insect-with-artificial-intelligence
