

We have bought a couple of Slamtect rplidar A3 units. Initially happy with their performance, once we mounted lidar’s on the same system (robotic platform) we have noticed that the units are behaving differently. We mounted lidars on the same axis at the same 0 rotation angle. The scans should be then more or less identical in such a case (one is purple, the other is red colour), but as you can see they are considerably different but this difference is changing. Sometimes they coincide more or less, sometimes one shifts to an angle with respect to the other. The scans are taken in a room of approx 3.5x6metres. We are not sure if one of the lidar’s is just defective. Anyone has any ideas, comments on this? Sorry for the photo quality, this was a screenshot, needs a little bit of zooming to see the differences.

Hi @osvaldas and welcome to our forum!
Can you share a photo of mounted lidars on your robot?
What happens with the results if you remove one?
Hi @osvaldas,
Welcome to the RobotShop community!
@osvaldas As @igor_X said, pictures would be helpful for making this more clear.
Are you using both LIDAR at the same time or scanning with one of them, turning it off and then scanning with the other? Or am I completely misunderstanding this and you are only scanning with one at a time but switching them physically on the same mounting spot?
From what I can see from that single image, the scans do seem to be the same/identical in results, simply offset by an angle that as you mentioned varies over time/between different scans from what you think of as the absolute 0 (“0 rotation angle”).
According to the specs, you may have up-to 0.54° of variance between one measurement and the next, or about ~666 measurements per 360°. Please note the total number of measurements varies between each rotation/scan. At a distance of 3-5 meters, 0.54° translates to about 3-5 cm of distance.
Is that change in the delta between the two sensors changing as they are running or between power cycles? If between power cycles then it is most likely related to the initialization process of the sensor and its onboard electronics.
You’ll most likely have to calibrate the two sensors to each other to get results that are consistent between the two (see above comment concerning your different; it really does seem like a different in what the sensors assume is 0°).
Doesn’t seem like defective hardware but more likely a need for calibration for your use case (using two rplidar A3).
You can always reach out to the manufacturer, too. I think this is their support contact address (email).
Maybe the answers from you to the questions above will help us figure it out! 
Hi @scharette and @igor_X,
Thank you both for quick response. The scan that I shown in the photo was taken when the lidars were mounted on the same axis as shown here:
Both lidars are running at the same time. The scans do not change between power ups.
I will soon post the scans taken when the lidars are mounted on the robot and calibrated but we still get a discrepency between scans.
Hi All again,
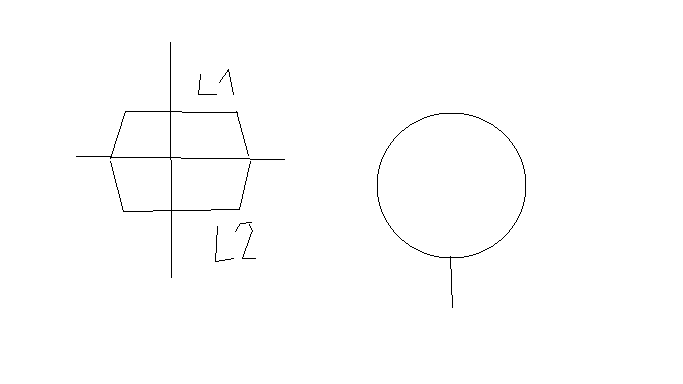
Here is a setup on our robot. The sketch below shows a top view. The lidars are mounted on the two corners of the robot on 8mm thick aliumnium plate. Both lidars are capable of scanning around 270degrees, the remaining 90degrees are block by the internal structure.

The lidar positions and yaw angles were calibrated. Some example scan is show below. Please pay attention where the scans of both lidars overlap. The ‘red’ scan seems always a little bit further away than the ‘purple’ one. And at the top of this scan this discrepency is huge. As the ‘red’ scan is always further away than the ‘purple’ one, it does not seem that the issue is coming from the calibration errors. For reference, the edge length of the square is 1 metre.

Any insights - much appreciated!
Sorry for the delay in getting back to you, got a bit busier than expected lately (online conference taking all of my time!  )…
)…
As for your situation, here are some of my thoughts:
-
First off, running the two sensors at the same time may have an impact on their results as they both use the same frequency of signal and a similar style of signature and encoding, thus it is very possible they are interfering (slightly) with each other. I figure on that point it would be best to ask Slamtec directly how impactful this could be on the accuracy and precision of their sensors.
-
The disparity in the top left corner between purple and red (according to the 1 meter scale) seems to be about 9 cm. The origin is around 4.3 m (or 430 cm) from that area at the top left. As mentioned above, 3-5 m means at least 3-5 cm of ±variability in measurement distance.
If you add to that the possible interference from the sensors to each other (and reflectivity of surfaces, etc.), it seems likely that 9 cm of variance is reasonable at 4+ meters.
Also, the two sensors can be - according to your diagram - somewhat far apart (opposite corners of the robot). If I remember correctly, those LIDAR are at least 7-7.5 cm wide, so they can’t be closer than that (half of each) and therefore their origins are 7 cm apart and their data should be that far apart too (unless corrected for).