


SimpleClient_0.zip (11480Bytes)
SimpleServer_0.zip (11406Bytes)
ArduinoFirmata.pde (486Bytes)
PicaxeFirmata.bas (375Bytes)
I've tried to do this a while ago and I've had some problems finding documentation about this, so here is a quick and simple tutorial.
First of all you'll have to have both computers connected on a wirelless network. If you don't have any you can create an computer-to-computer network like it is explained on this site: http://www.cs.washington.edu/research/edtech/presenter/doc/adhoc.html.
When you have got both computers connected you'll need two applications one on the controller computer to send the information, and other on the computer connected to the board to intrepretate the information received and to send it to the board.
I've developed my applications using processing, that is a really easy language to learn, but if you prefer you can use any other program.
They are supposed to control two motors but they can be easily re-programmed to do any other thing. I use them to remote control this robot.
To make them work with yours you'll only have to do the following:
- Open your board correspondent Firmata, change the highlighted areas and upload it
- Open SimpleServer.pde on your controller computer and run it.
- Open SimpleClient.pde on the computer connected to your board, change the highlighted areas (COM port and server IP) and run it.
So, It will work like this:
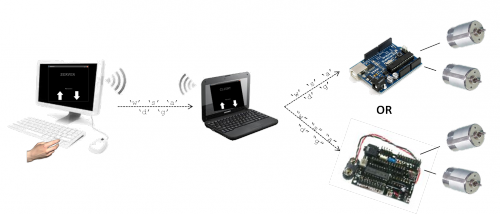
When you press one key (UP, DOWN, LEFT, RIGHT or S) on your controller computer keyboard, the server application analyzes, shows the arrows images and sends the correspondent letter (w, s, a, d or g) to the client application that analyzes, shows the arrows images and re-sends the letter to the arduino or the picaxe board which analyzes again and do whatever you wrote on the highlighted areas of the Firmata.
If you have any problems please tell me that I will try to help you.