

Is this a worthy challenge?
Imagine a robot racing across a rubble strewn site, never having to pause when it encounters a sharp rise or dip in the path, and quickly turning without scrubbing soil or rubble!
One of the difficulties with Tri-wheel robots is turning. The turning radius is better gradual to avoid scrubbing the tires. However, if the Tri-wheel could balance on only one wheel the turning radius is not as limited. Further, if the Tri-wheel is balanced then it will more easily cross a rock or other steep rise since the next wheel will already be elevated.
Balancing requires a very low in backlash between the motor-to-wheel connection in order to respond quickly to tilting.
Is it correct to think that Tri-wheels cannot be built so that balancing on one wheel is possible? The reason for asking is that searching for balancing tri-wheels has resulted in no results.
tri-wheel from globalspec
{kind=link}
Hi there,
I’ve never heard of 3-wheels balanced robot.
I’ve heard of 3-wheeled omni-wheels robot, they are great: robotshop.com/en/3wd-100mm-omni-wheel-mini-mobile-robot.html
Also, I’ve already seen someone creating a one wheel balancing robot: https://www.youtube.com/watch?v=f1XI5MoPbYI
Pretty interesting too.
I’m not sure I can understand what you want to achieve but if you have a drawing of your robot, it could help me to figure out the concept.
Cheers.
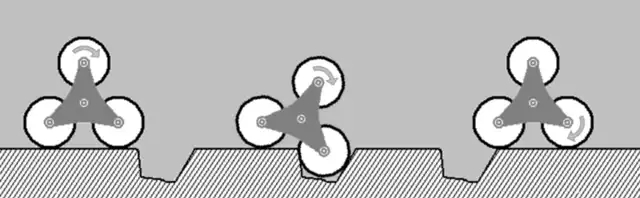
I want to be able to run this “wheel” with one tire on the ground. This will reduce friction and make turns easier. It will also make crossing elevated obstacles faster.
Do Omni-wheels work on slopes? Just asking out of curiosity, I’m not planning to use them.
It will also make crossing holes easier as the drawing shows.
While complicated, a position and/or torque sensor on the main axel is likely the solution.
The motor driving the main axel would have to be equipped with something to alow it to be shifted when the bottom wheel hits something. Once the shift happens the motor starts turning the assembly until another wheel is down. At which point the wheels motor would become active. The two wheels which are then up are inactive.
What do you think it would take to make this happen?