

Hi All,
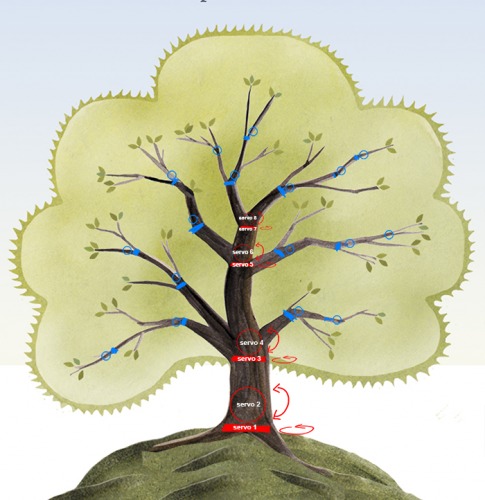
I came up with an idea to make a 40 servo robot tree (or seaweed) that can flail its trunk and branches, lol! The trunk will consist of 8 servos (red), and there will be various other servos scatterd around to provide branch and twig movement (blue)
This site and others have been very helpful just by looking at guides etc. It seems as if all i need to make this robot is servos, a frame, some type of board with the motion program, and power.
From browsing online, it looks like i have 2 choices for a servo, one with a built in potentiometer, and a stepper motor.


It looks like the first type is a bit more expensive, but there are boards out there can handle at least 24 of these .

With regards to the stepper motor, I've only seen a board that can control 6 axis, or six servos.
1. How would I control 32 stepper motors if a board can only control 6? how would i get these boards connected and talk to each other?

It looks like stepper motors are cheaper, but the controller is more expensive. stepper motors can also come in really small sizes. But the super small motors will have very low torque.

So one of my questions is,
2. what is the best type of motor/servo to use to make this robot tree?
For the software, it looks lik Justin Dailey used the 3d animation software bledner 2.49, a 3d mockup of his robot arm, plus some code, to drive an actual robot arm. The best part about that setup, I wouldn't need to program each servo, I can just create a 3D rig, with some type of kinematic spline, and then position parts of the tree where I want to, then the rest of the servos will follow along. I can loop the program and then I'd be done.

3. Does anyone know of any other software where this type of animaiton style programming can be done? the maestro 24 channel board above comes with software that is similar, but I'd have to program each servo, and wouldn't get the fluid movements of a kinematically splined 3d rigged setup.
4. How would i get some joints to rotate 360 degree without the servo wires (ahead of the servo) getting all tangled up?! I guess I would need to use a Slip ring of some type.

Can i really slip the wires of 39 servos through a slip ring at the base of the tree?
5.as far as frames for the tree go, I was looking at servo blocks (by Robot Zone)

Are these a suitable choice for this tree application? Will these work with stepper motors? It doesn't look like it...these look to be speciialy built for specific servos. I don' t know how to attach a slip ring to this setup anyway and all help is much appreciated.
Thanks in advance for looking at this post and assisting me with my robotic tree!













