Ok so I’m putting together a excel spreadsheet with the leg torque equations in.
But I’m getting into a bit of a mess, all my measurements are in meters weights are in kg.
So, first question is when finding w1 w2 ect do I need to calculate that in Newton meters mass*9.81?
Secondly when doing the first equation n1 + 2n2 is 2n2 (n1/2)/2?
Thirdly,
Is this one continuous calculation, and why does it cover joints repeatedly as it works from n1 to n2.
Think that’s all for now, any help appreciated.
@RickyBurton. Best to use Newtons and meters to get the torque (SI standard).
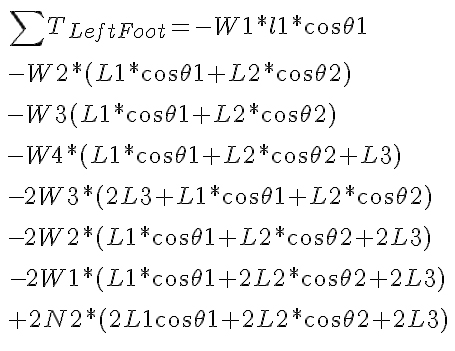
The torque about the left foot doesn’t give you the torque about the joints - those are “Torque Knee”, “Torque Hip” and “Torque 5”.
Realizing that the article needs to be reformatted for the new Community.
-
‘w’ are the weights (as opposed to masses), so Newtons is best (metric). As you stated, F=m*g.
-
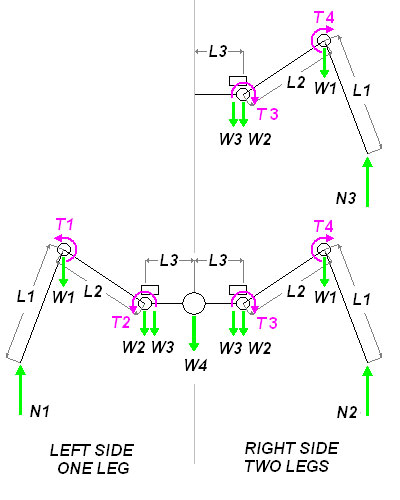
With three legs raised, the weight of the robot is distributed over three legs (three points of contact), so if the robot is in a symmetric stance, with the center of mass not off to one side, “the weight of the robot is assumed to be evenly distributed on both legs on the right side, so the reaction forces, N2 and N3 are equal”. It’s an approximation which makes calculations a lot easier.
-
It factors in the “other side” of the robot, where the measurements and weights are the same. The torque balance is done using the bottom image here (keeping in mind there are two legs on the “other” side: https://community.robotshop.com/uploads/c/b/cbenson/imported/legs2.jpg
Thanks, @cbenson,
I think I have my head wrapped around it now, as I’m building a 4 DOF hexapod, the equation will need to be reworked, once I have a spare bit of time I will knock together a drawing with calculations, hopefully it will be on the right track, by then I will be back in to lectures and hopefully they will be able to shed light on the calculations I put together.
@RickyBurton Interesting! If you’re up to taking the time to understand and confirm the calculations for 3DoF (if you spot any errors or have questions, do tell us here), it should certainly help when you do a 4DoF. Keep in mind these calculations are to estimate the max torque needed, where the robot simply has three legs in the air and three legs on the ground, on a flat surface.
well I have put the calculations into an excel sheet if anyone wants to check over it please do, if all seems correct I will start looking into doing a 4 DOF version.
Hello
Can you please share the excel link.
thank you for the help.




{kind=link}