

*** 1.1 update ***
The hexapod now has some better code for sensing. The hexapod makes a 360 spin which it takes as 9 point turns. At each point it takes a reading. It compares all the readings and decides which way is best. In the video i demonstrate this with a small gap for the robot to go through. The robot basically is making a simple map, very simple, and finding the biggest hole to go through. The robot still has its curve to the left i need to fix. When that is fixed then this code will be much better in that it wont run into things by curving into them. The next update i will be showing a rc mode i plan on doing with a controller i will blog.
1.0
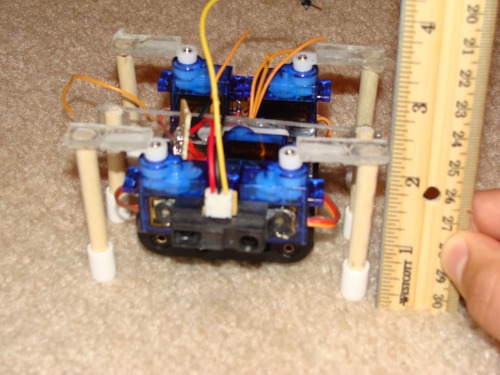
This is my first robot with legs.I do have RBBB (http://wulfden.org/TheShoppe/freeduino/rbbb.shtml) It uses a sharp sensor to detect objects and then decides the best way to go. When the robot runs into something, it first turns right and makes a reading, then it turns left and makes a reading. If the right reading is greater then it will go right, if the left reading is greater, then it will go left (which means just straight, because it is already left ;)) if they are equal then it goes left. You can see this in the video. Just pay attention to its movements. If anyone would like the code i can post it but i do not see the use now. The robot does seem to drift to the right, i need to fix that if i can.

I got a desktop band saw friday from Lowes here in the USA. I used this to cut out all the parts for this robot.
The saw plus some lexan and 5 of the 8 servos i bought for 99 cents a piece on sale, and you have my robot.
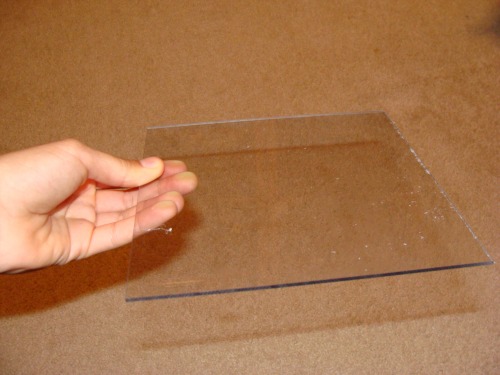
found this lexan at The Home Depot here in the USA. And now i think all my projects will be made of lexan :)

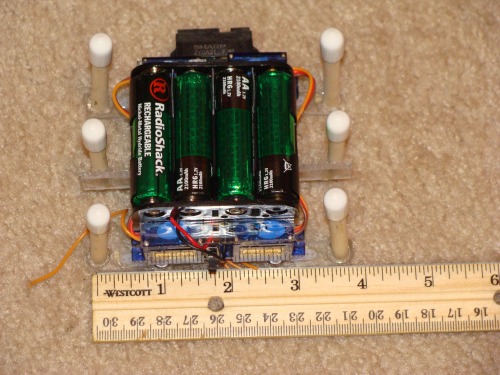

you can see my little power distribution board in the above picture. The orange wires go into the arduino.

It is not a finished robot yet. I am going to add rc ability to it in a few weeks.
Walks and navigates with infrared sensor
- Actuators / output devices: 5 tower pro 9g servos
- Control method: autonomous
- CPU: Arduino RBBB
- Power source: 4 AA batteries
- Programming language: Arduino
- Sensors / input devices: Sharp IR
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/hex-1-1-the-hexapod

