Herr Mimik is a table robot which consists of a single 5DOF robot hand and an animated head. So far I've built the hand and parts of the head. The hand is also used as a studying object for the MAAHR project.
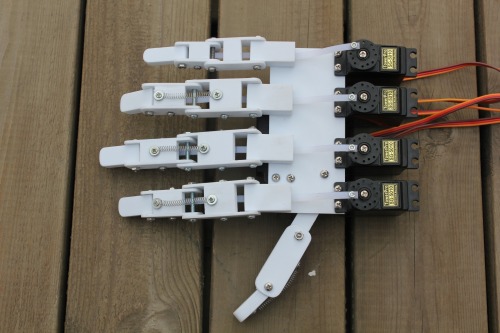
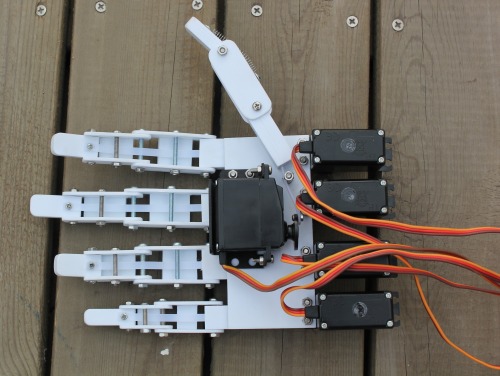
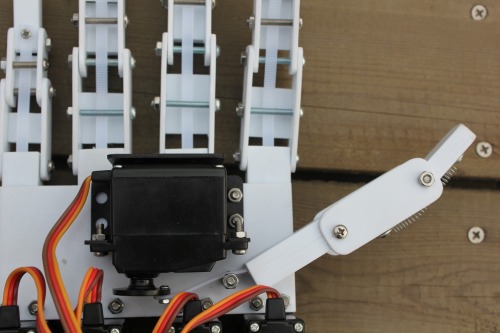
Construction of the hand
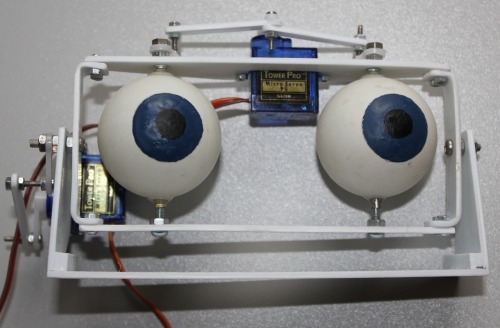
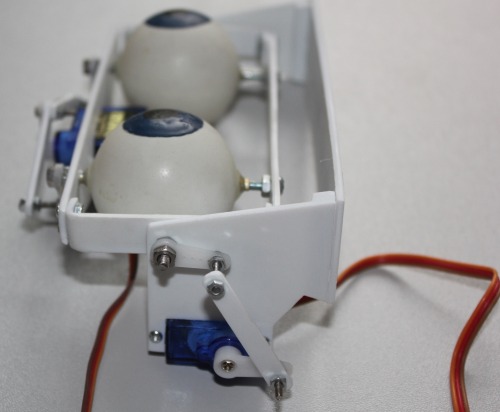
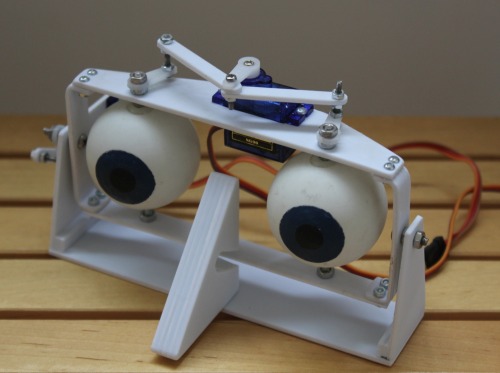
The eyes are vertical and horizontal moveable. A nose will be added, maybe with a CO2 gas detector to detect human breath.
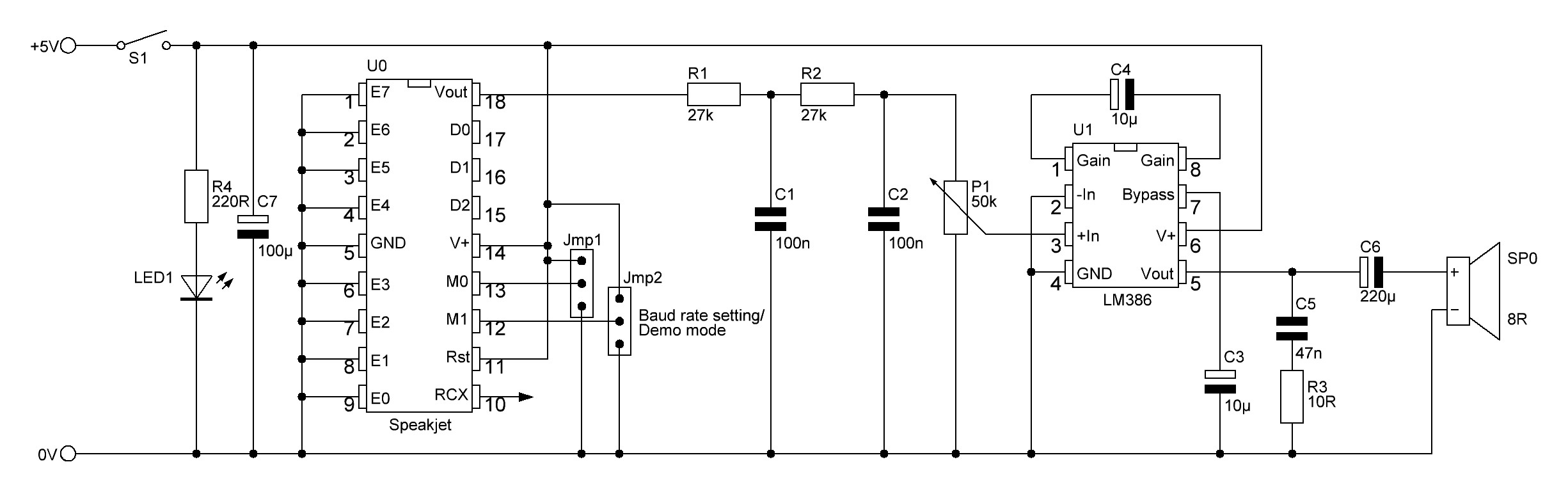
The two jumpers are used to change the baud rate by changing the logical states of pin M0/M1 and sending the serial sync character (hex 55, dec 85) at desired baud rate. Around 1400 words in decimal format can be found here. The complete decimal code of one word is composed of:
Interesting and sharp looking design! - look forward to the video. You inspired me to check out the price on the SG5010 servos and at $5 including shipping from Hobbypartz I decided to pick up eight of them - hope they are good performers
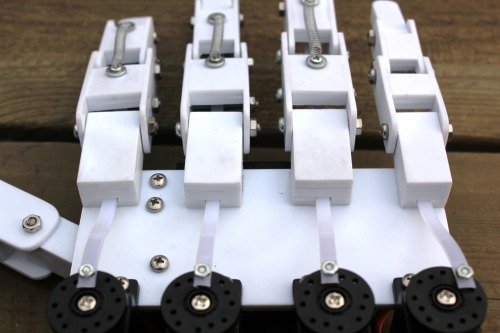
I needed small springs on the knuckles and have updated the design. Only the little finger is lightweight enough and doesn’t need any additional spring.
I had the same thought. If you could find springs that were a little stronger, but still allow the servos to overcome their pull, the robot’s fingers would extend more completely.