


Herr Mimik
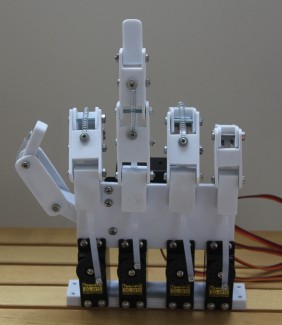
Herr Mimik is a table robot which consists of a single 5DOF robot hand and an animated head. So far I've built the hand and parts of the head. The hand is also used as a studying object for the MAAHR project.
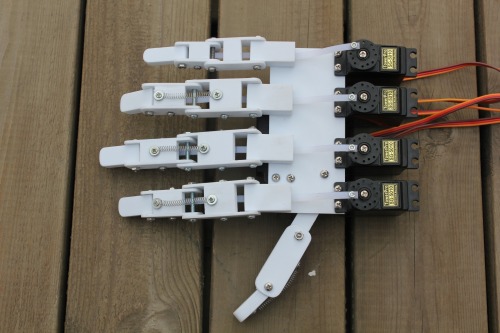
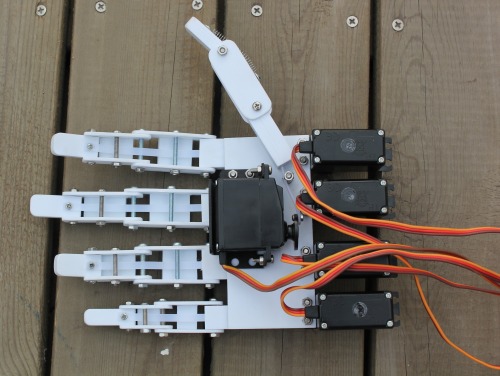
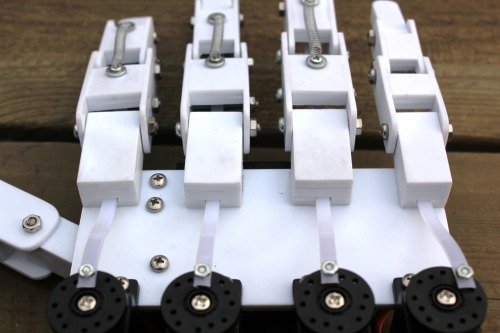
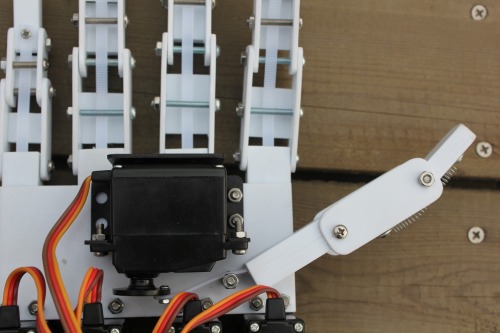
Construction of the hand

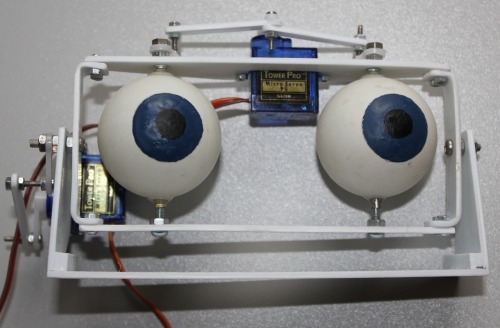
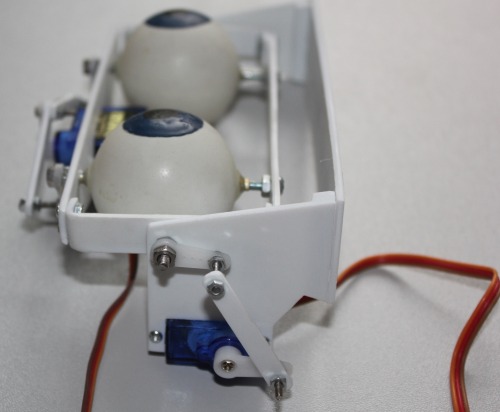
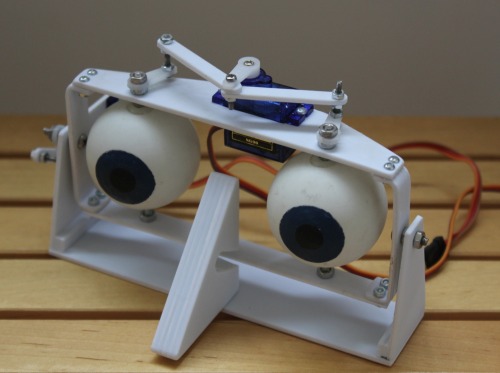
The eyes are vertical and horizontal moveable. A nose will be added, maybe with a CO2 gas detector to detect human breath.
The animated mouth will be something like that.
I did some first experiments with the speakjet chip. The schematic is as following:
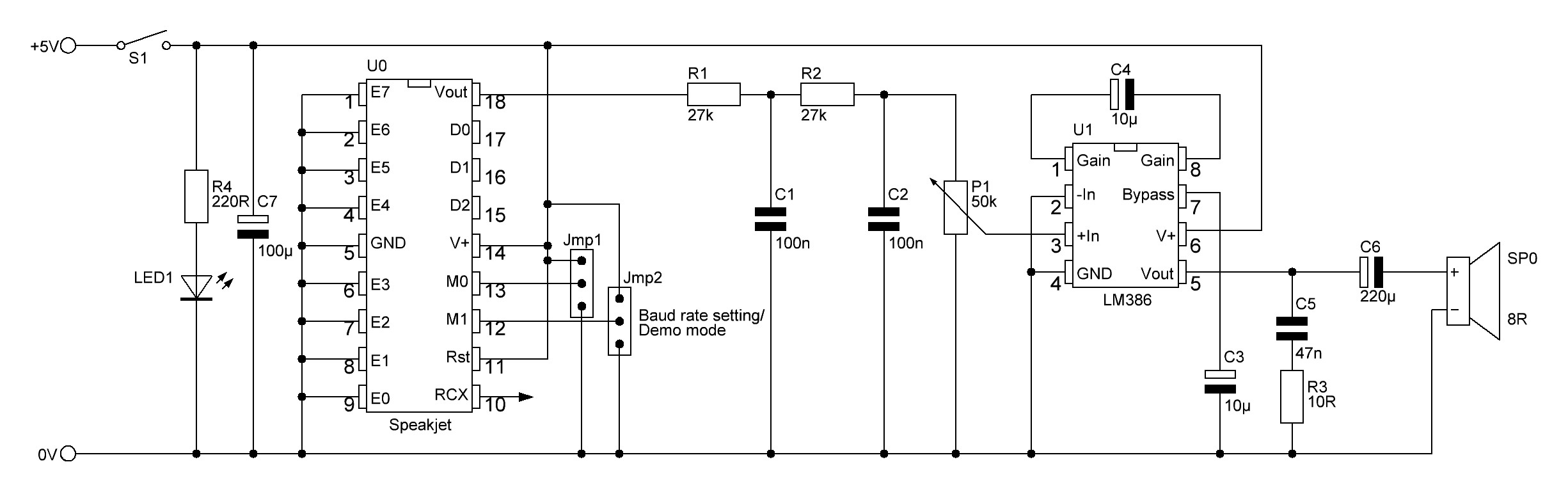
The two jumpers are used to change the baud rate by changing the logical states of pin M0/M1 and sending the serial sync character (hex 55, dec 85) at desired baud rate. Around 1400 words in decimal format can be found here. The complete decimal code of one word is composed of:
20, [volume], 21, [speed], 22, [pitch], 23, [bend], [word code].
The volume can have a value of 0-127, the speed a value of 0-127, the pitch a value of 0-255 and the bend a value of 0-15.
Listens and speaks, moves its hand and animated head
- Actuators / output devices: 5 TowerPro SG 5010 and 2 SG 90 till now
- Control method: autonomous
- CPU: Not decided
- Power source: 7.2V 4000mAh RC battery
- Programming language: not decided
- Sensors / input devices: Sharp IR, Speech Recognition
- Target environment: indoor