Hi there. I've been reading LMR for a while, and have just taken a few baby steps on the way to my first robot, so I thought I'd follow the rules and post a blog entry as a start.
I suppose this may be typical - I've spent a lot of time, probably too much time, pondering what I'm going to use. It's pretty clear that I've reached the "analysis paralysis" stage and can probably go on forever, so it's time to get a few things put together and take it from there.
My initial parts list:
- Arduino Uno (have already)
- 20x16 acrylic board as a chassis, so I'll have some space for experiments (have already)
- A couple of the ubiquitous cheap Chinese geared DC motors
- A small breadboard, again for experiments
- A mini servo to hold a distance sensor
- A Sharp IR distance sensor
- 4 x AA NIMH for power (have already)
- 2 x 54mm wheels
- Tamiya ball caster
I've not decided on what I'll drive my motors with yet. Getting a dedicated shield seems the simplest route, in which case the Adafruit one seems like a decent deal as it'll run servos and steppers too. I have some components lying around that I can probably DIY into a something, or maybe a H-bridge chip like a SN754410?
As to design, I sketched it out below - just a basic tail dragger with differential steering:
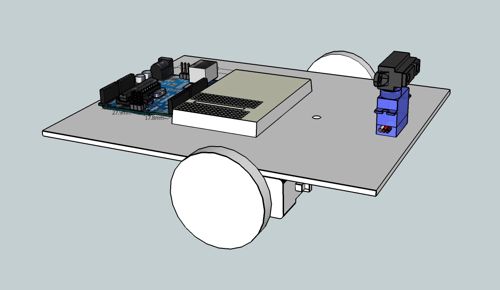
Once I start building, I'll put up a project page.
Long, long ago, when the Earth was young and I had hair - and long hair too - I actually got a degree in this stuff. People designed things using pens back then, which are little sticks with black liquid in them. Can you believe it, kids?! Then I wrote code for a long time, and then I managed people who wrote code, and now I manage people who manage people who write code. The people who write code ask me questions like, "tell us about the old days, grandad, when memory was a limitation". C'est la vie. Things are no longer powered by coal, and Pascal is no longer cool, so I'm back at the thin end of the learning curve again! Go easy on me, eh?
Looks like you have a good
Looks like you have a good start. I agree with the choice of getting a motor shield. I’ve never had a aurdino, but I think the next time I get a board, thats the route I will go, and that’s mainly because they do have the nice shields already to go for you. I know a lot of people like to build their own boards and motor drivers…but I like to spend my time on the mechanics and writing code (I’m a mechanical engineer).
Welcome to LMR by the way, I’m kind of new myself.
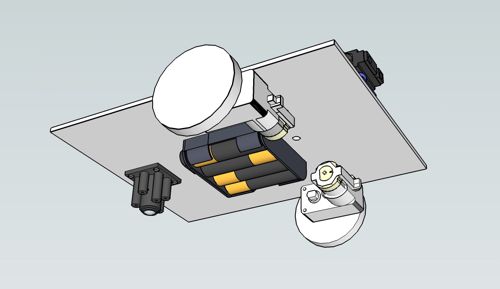
Update to design
I worked a little more on my design. Sketchup’s great - it highlighted that my caster and wheel combination would not be good - the deck could not be made horizontal without adding a large spacer or other ugliness. I also did some basic math with the motor speeds and wheel sizes, which showed that the robot would be very slow even if running unloaded at full speed. So, I tinkered with the design and moved the motors to the top of the deck, and I’ll use 90mm wheels instead. This appears to be a far better combination. The motors I’m using are pretty puny, but should cope; I can always look into something stronger later. I also decided to mount the Arduino on 12mm standoffs (which I have anyway) to allow easier mounting of the ball caster.
The latest design looks like this (I also tweaked the materials to be more accurate):
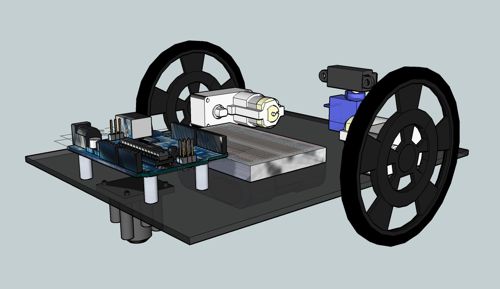
Everything's ordered now except the wheels! Can't seem to source a pigtail for the sensor, so will improvise for the time being.
About motors
Don’t be too cheap when choosing your motors. For example, the ones that Tamiya ships with their dual gearbox kits are horrible:). They draw a lot of current(up to 2.1A when running on 3V) and they produce a lot of noise too. Both electrical noise and electromagnetic.No need to overdo it and go for the most expensive ones you can find though. Pololu makes some really nice geared motors.
Just my 0.02€
Thanks for the advice - much
Thanks for the advice - much appreciated, and I hear what you’re saying. Basically there are two reasons why I’ve not gone a bit more “upmarket” with my motor choice. First is that as a novice I was a bit concerned about the magic smoke escaping from something expensive; second, I live in New Zealand and our choices down here are pretty limited, and often very expensive. We generally pay a huge mark-up over the rest of the world, and shipping things in from overseas is a killer. Fortunately there are some great local exceptions like Mindkits who offer fair, sensible deals.
I do have my eye on a couple of NEMA 17 size steppers on our local auction site, and there are also a couple of geared DC motors with built in encoders that are going pretty cheap at one of the local electronics distributors. So, I have options, but my piggy bank’s looking a bit sad and deflated at the moment!
90mm wheels and 5mm hubs to
90mm wheels and 5mm hubs to fit the motors now ordered. That’s the last of the parts. Come on, Mr Postman!
A relatively cheap but good
A relatively cheap but good motor with built in encoder is the surplus Faulhaber motor. At $11.95 it is not a bad deal, but sometimes they have it on sale for $7.95. That’s half the price for a micro gear motor from Pololu or Solarbotics.
Review here.




