

Today I added two videos showing the actual status of platform development. It is now TV remote controllable with real-time video feedback.
Two new videos are available showing my small son controlling the robot. At right side is a laptop with realtime videofeed from robot camera.
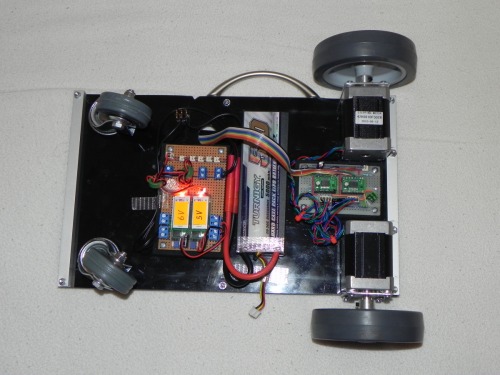
Here is the bottom side of platform. Big wheels are 100 mm in diameter. Two steppers have 7Watts (6V, 1,2A) of power each, and are controlled by tiny Pololu drivers (between motors) http://www.pololu.com/catalog/product/713 designed for max 3Amps current drain. The only battery is Turnigy 5000 mAh 7,4V Li-poly which should deliver power at least for 45 minutes of full operation. As a voltage stabilisers I used 2 Turnigy BECs. Its advantage is that it does not overheat even at 5Amps current drain. One is rated at 5V for logic and LAN components, second is rated at 6V for motors and servos.
Two front wheels are furniture free-rotating rubber wheels. The frame is made from aluminium and plate is plastic board from writing pad. On one side there is a drawer handle for easy transport.
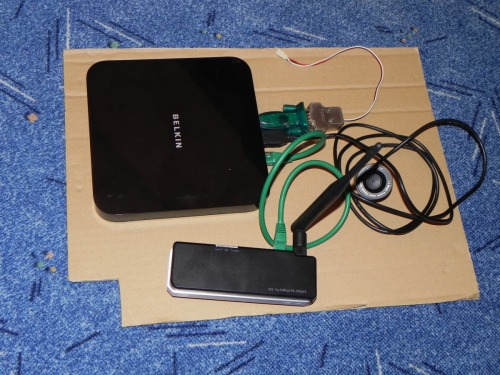
To keep the platform fully independent I equipped it with wifi connectivity (parts are shown before instalation to the platform). Down in the photo is small ASUS access point. Big square piece is BELKIN "USB to LAN" hub http://www.belkin.com/networkusbhub/ . Anything you plug into it´s USB ports works like it is plugged into your computer. I connected regular webcam to see what robot sees. But most valuable is that you can connect robot´s Picaxe to it using RS-232 cable, so loading of programs is by wifi, which is very convenient for experiments. There is no cable needed between computer and robot. All "debug" data are awailable by wireless.
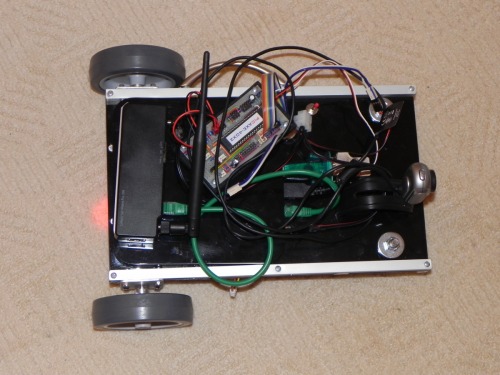
Above is fully working platform with wifi connection established and main Picaxe board attached. Final mounting yet to be done. I replaced webcam by another one providing smoother video. Movies from initial runs are attached above.
Platform on TV IR remote 2 - The best home videos are here
Platform on TV IR remote 1 - The best home videos are here
independent movement
- Actuators / output devices: Two steppers 7Watts
- Control method: IR remote and autonomous
- CPU: Picaxe 40X2
- Operating system: Picaxe basic
- Power source: 2cell 5Ah Li-Poly
- Programming language: Basic
- Target environment: indoors, flat surface outdoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/heavy-platform-phase-2-on-ir-remote

