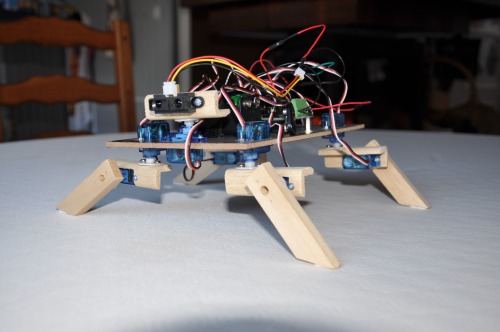
This is my second robot. It's inspired by Chopstick Junior, https://www.robotshop.com/letsmakerobots/node/29708.
Few months ago I found where to buy cheap 8g servos and decided to make myself such walker.
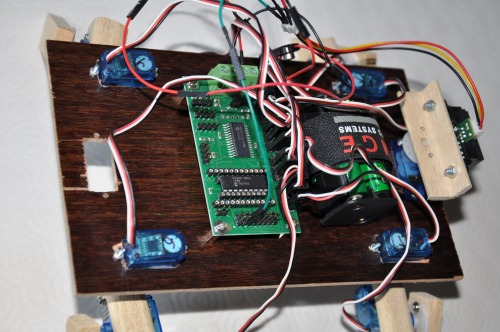
The SD21 servo driver board for 21 servos, promoted by Picaxe. Additionnally to be ready to use, it allows to control speed of each servo. I use the speed control to reduce the noise and I assume the wearing of those fragile, light servos.
Range sensor IR servo is working at a different speed than others.
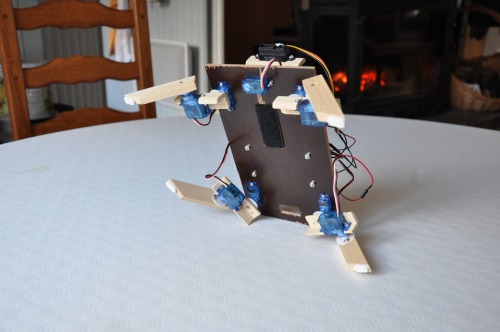
From the beginning my biggest concern was about the wheigt.
Each leg wheigts 22 g, if I remember well.
The 4x AA cells 600 mAh wheigth 30 g in total. Unfortunately 2 of them died recently before I could finish the code properly...
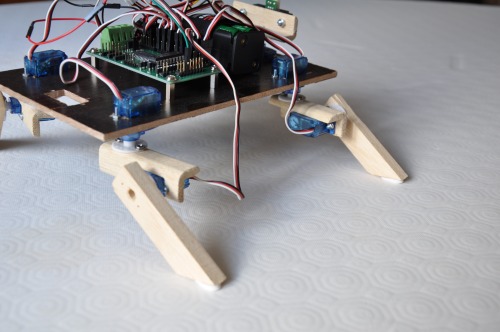
The plate could be much smaller. But I didn't know where to go in the beginning, where to place the servo driver, the battery, if the servo cables would be long enough.A good improvment would be to place the SD21 board in the middle of the plate and the battery pack at the same place but below the plate. Today the robot tends to fall from the front when going forward because of the battery pack.
I could also cut a new plate, shorter, but I'm not sure I would save much wheight.
For those who wonder what is the empty hole in the plate, it was supposed to have a tail...
As one of the servos is already dieing, I keep it apart as spare.
That will make a great base for any future project! Don’t scrap it! Here a a few future ideas: try finishing your robot’s tail so the robot can walk on its hind legs (tail as a counterbalance/weight). That or add a mouth onto the front of it, and then have it be able to pick items up. Finally, you could enclose the top of the robot and have it be able to walk upside down too (through leg servo rotation). Keep up the good work!
Nice done I am glad that Chopstick Junior inspires so many people
An advise for your walking. Lower the leg diagonal opposite to the leg you are lifting, to shift the weight and keep the robot standing while supported by 3 legs only.
Also try to center the weight (battery pack, controller) to get the weight distibution balanced. This way you will be able to programm a smoother walking pattern.
No doubt, the original Chopsticks is one of the most impressive constructions here on LMR. However, as you already said, walkers are cool but to program the walking pattern is quite a pain and yes, it takes time.
A 7.4V PiPo will do the job, i am also thinking about to re-build Chopstick Junior and put a LiPo on it.