

***Update 04/08/2012***
Some more programming done, see video HEAND_2: Random movements of the hand, touch sensor (integrated in its head), changing eye color when touched.
***Update 02/08/2012***
Testing the IR compound eye and the RGB LED eyes, see video HEAND_1. Next step is to program the touch sensor and multi color pattern for the LED eyes.
I am working since two months on this table top robot. It displays a 2 DOF head with 2 full color RGB LED eyes and a 8 DOF robot hand (6 DOF hand and 2 DOF wrist), hence the fancy name H.E.A.N.D. As it is a table top robot, I have no issues with batteries - I simply use a regulated S-100-5 5 V/20 A power supply, which costs 52 RMB (~8.2 USD) on Chinese ebay called taobao. The robot is equipped with following sensors:
- Sound sensor (based on LM358 or LM386)
- Touch sensor (a metal plate hidden in its head, all PICAXE M2 parts plus the 28X2 and 40X2 support touch sensors)
- Dagu IR compound eye
- Gas sensor MQ-3 (alcohols)
- Color sensor (TCS230-DB)
- Temperature sensor (DS 18B20)
H.E.A.N.D.'s tasks are so far:
- Object tracking (hardware built, coding done)
- Reacting on touch by changing eye color (RGB LED eyes as described here)
- Speech (using a SOMO-14D if I get it working on a Windows 7, 64 bit. Can't even access the website with most VPN connections from China or download any software!!!)
- Color sensing and speech output
- Gas sensing and speech output
- Building a personality according to its experiences and pre-set thresholds
- Hand gestures
- Playing Rock-paper-scissors (recognition by color cards?)
Here are some images of the built...
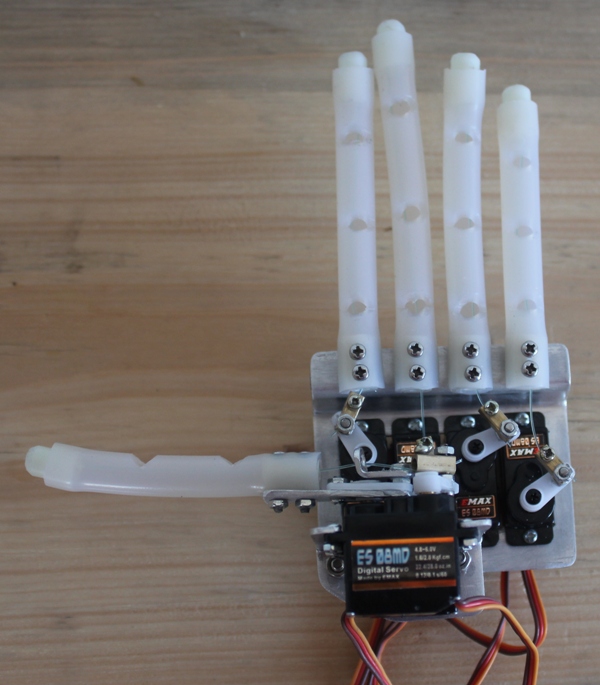
Fig. 1 Hand back view
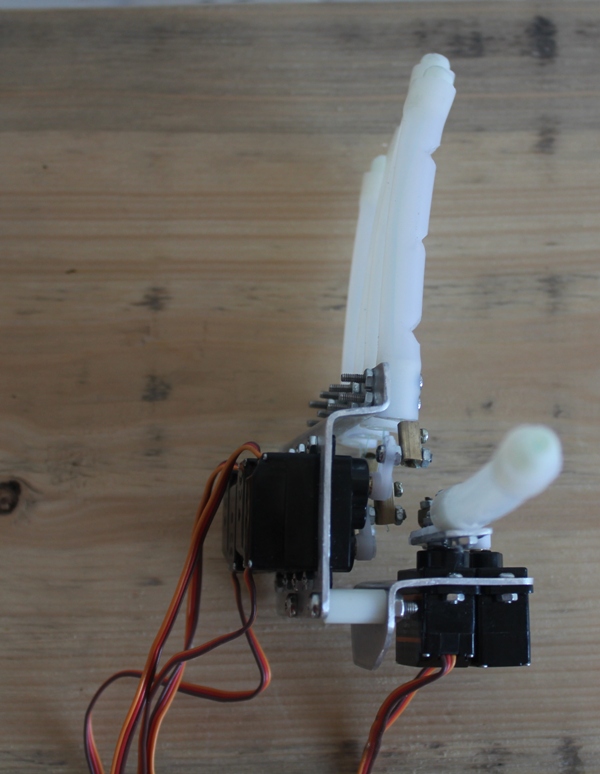
Fig. 2 Side view of the hand
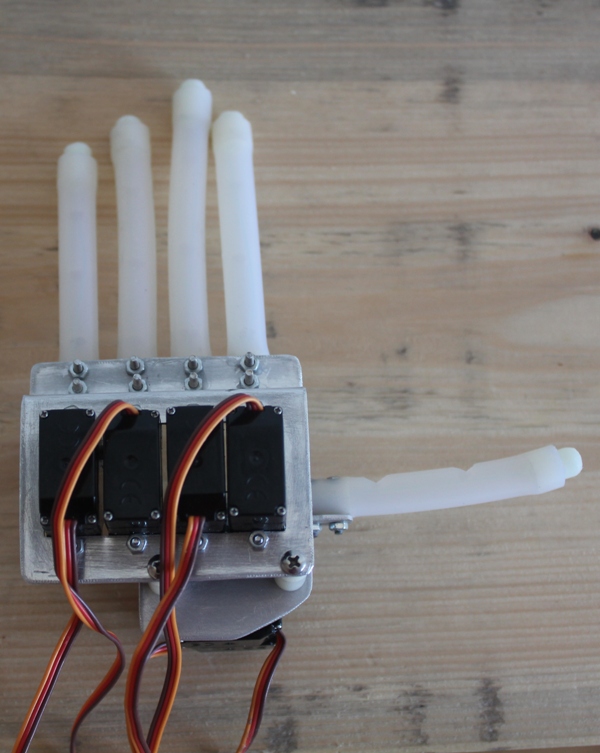
Fig. 3 Front view of the hand
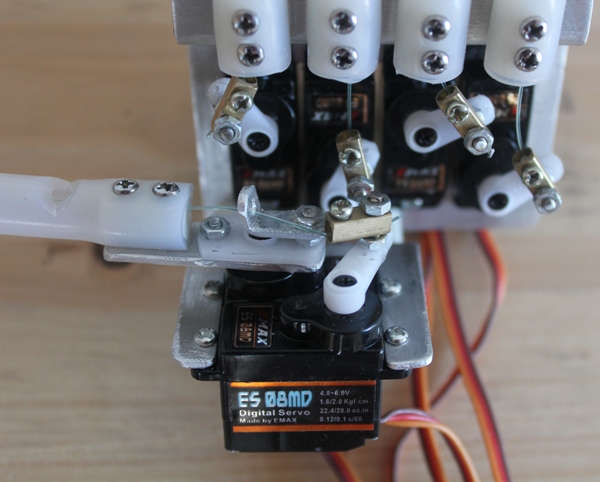
Fig. 4 Details of the hand. The fingers are made from Ø 10 x 2 mm silicone hose, plastic stand-offs, 1.5 mm aluminium sheet, Ø 0.5 mm fishing line, pushed and pulled by luster terminal inserts, mounted on the servo horns. The servos are digital ones with metal gear, turning 360 °, approx double price of standard 9g micro servos and a few milimeters smaller (normally used for helicopters)
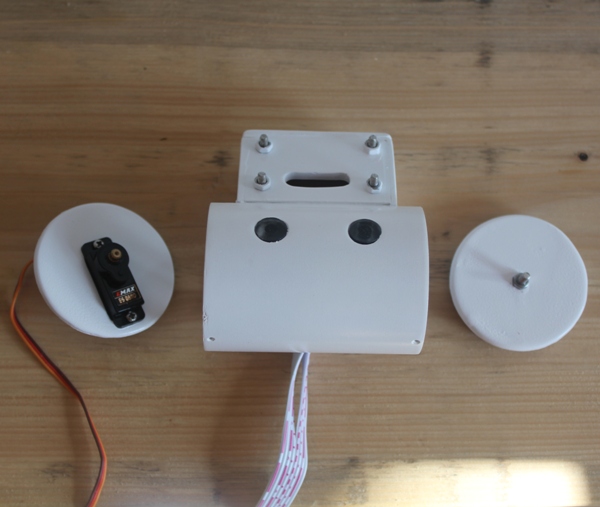
Fig. 5 Construction of the head

Fig. 6 Full color RGB LED eyes construction
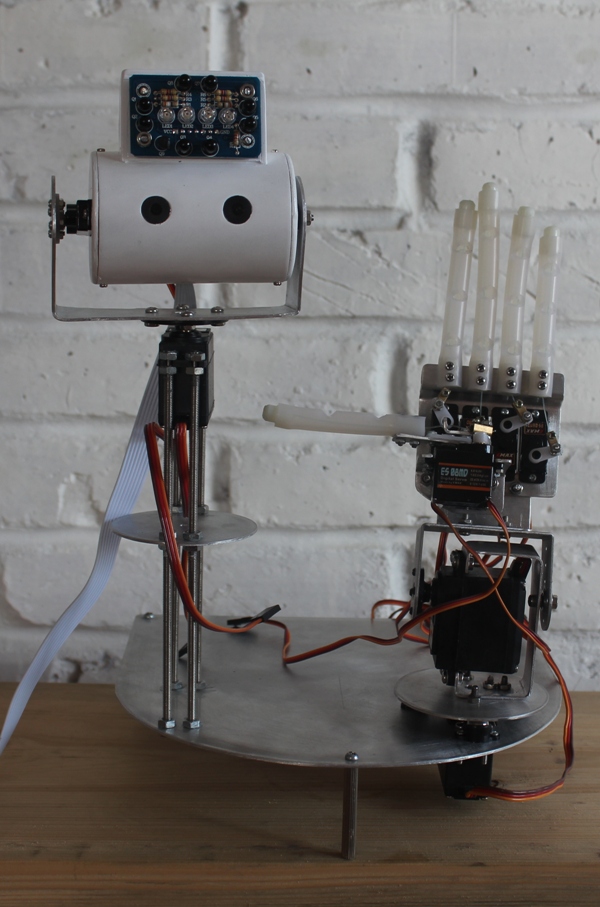
Fig. 7 Mechanical setup nearly finished
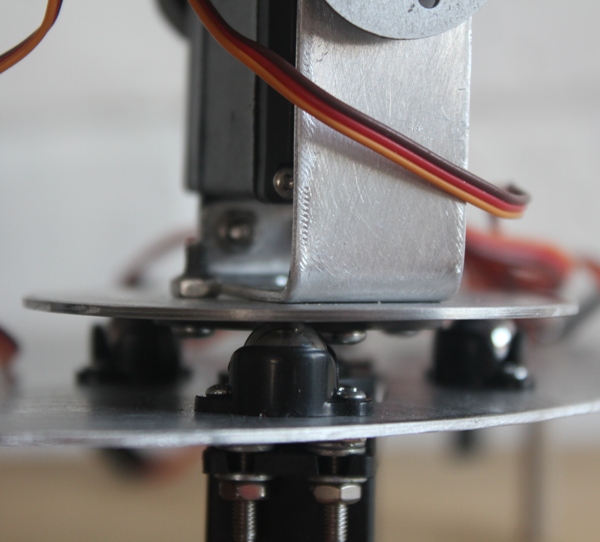
Fig. 8 Three mini ball castors supporting the turn able wrist
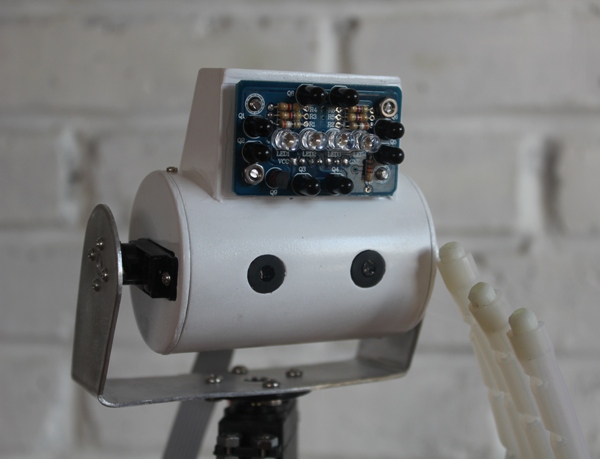
Fig. 9 Aye-Aye Sir! Your wish is my command!
Reacts on sensory input, speaks, shows hand gestures
- Actuators / output devices: loudspeaker, 2 DOF head, 8 DOF hand, RGB LED eyes
- Control method: autonomous
- CPU: 4 Picaxe 28X2 modules
- Operating system: Windows 7, 64 bit
- Power source: 10 A, 5 V power supply
- Programming language: Picaxe basic
- Sensors / input devices: gas sensor, Color Sensor, sound sensor, IR Compound Eye, temperature sensor, Touch sensor
- Target environment: indoors, table top
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/h-e-a-n-d

