

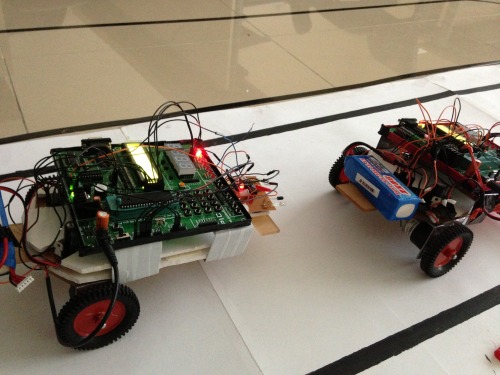
This is my Project which involves building/implementing two track followers. The objective of this project is to successfully design, implement, and demonstrate a working prototype of a guided vehicle system. A Leading Vehicle (LV) will move through a defined route marked by black tape all along the route. A Guided Vehicle (GV) will follow the Leading Vehicle (LV) without any kind of physical connection between them. While the LV can use sensors or other mechanisms to determine the marked route, the GV will have no way of determining the marked route on its own but it will be completely guided by the LV. In other words, the GV is not allowed to have sensors or other modules that would allow it to determine the marked route on its own. However, any other sensors or modules needed for following the LV are allowed. Similarly, LV can use sensors or modules to guide the GV.

the track that is to be followed
I have managed to implement the LV using IR sensors for line sensing but I am not satisfied with the output. I have embedded the LV video for all of you see and also the algorithm. I need help in implementing PID control and also a way through which GV can follow.
Also, I have used RF transmitter and receiver (HT12E and HT12D) to transmit 4 bit data from LV to GV (2 Left ir sensor outputs and 2 from right ir sensor). It did not quite work as I expected it to, hopefully someone here will have answers.
Vehicle Specs:
- Controller: PIC16f877a
- Motors: 2 X 1000rpm 12v 600mA geared dc motor
- Weight: 1.2kg (hence the bigger motor)
- Motor Driver: L293D
- Battery: 14.8v 2250mAh LiPo
- Sensors: IR sensor (4 on each side), LDR(red color sensor for stop line sensing)
- IC holder: PIC development board(working on making the PCB)
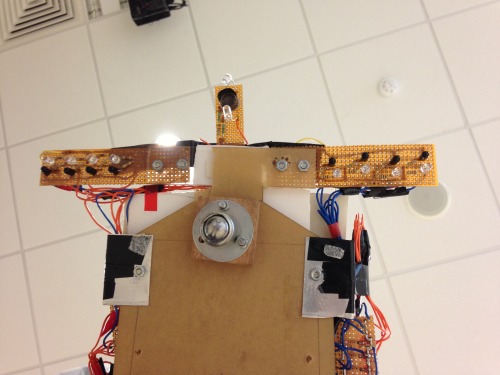
the sensor array
- Actuators / output devices: 12V Dc geared motor 1000 rpm 600mA
- CPU: PIC 16F877A
- Power source: 14.8 2250mAh LiPO
- Programming language: C
- Sensors / input devices: IR sensors, LDR red sensor
- Target environment: Route
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/guided-vehicle-system