

Update 2011-10-06: Melty, melty
Poor GRAB-E. His foolish creator left him in the garage for a few days after taking him home from a trip. The hot summer sun melted his polymorph sonar bracket and parts of this tracks.
Last night I got around to carefully picking off the slagged polymorph. I remounted the sonar with hot glue for now. New tracks just arrived this afternoon, so hopefully I can fit him up today.
I also tried out some new NiZn batteries in GRAB-E. They are AA sized and have a nominal voltage of 1.6V. Fully charged, they are about 1.8V. Since I used a LDO voltage regulator and a 4xAA battery pack, these work out great. Now GRAB-E starts off at 7.2V instead of 6V, and runs for a lot longer. Also, since the motors run directly from the batteries, he should really kick it into high gear now!
While testing out the new batteries with the old melted tracks removed, I noticed a distinct wobble in one of the drive sprockets. I tried to unbend it, but I probably just made it worse. Ideally, I should take him all apart and try to bang the shaft straight again. Realistically, I might not see much of an improvement for all that work. I'll try the new tracks and see if he runs OK.
Update 2011-07-13: Integrated IR circuit and updated code
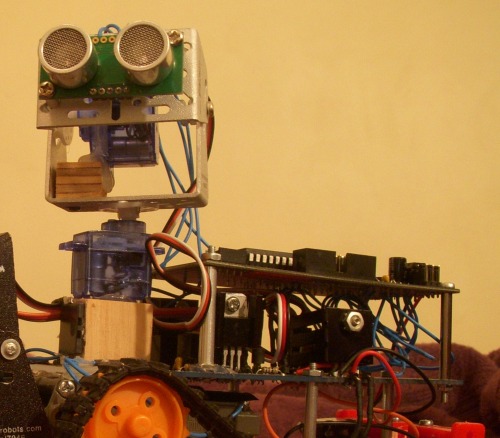
I moved the interface circuitry from a breadboard to one of those little circular protoboards from Radio Shack. It's only about 5/8th of an inch (or 1.5cm) in diameter. Getting everything on was a tight fit, but now it is hot glued to the little wooden block behind his sonar.
As usual, check GRAB-E's build blog for more detail. I'll add new pictures and video soon.
Update 2010-09-30: New Head
I replaced GRAB-E's head and reduced my servo count by one by combining his sonar sweep with his claw. Check GRAB-E's build blog for more detail.
Update 2010-09-12: The CLAW!!!!
GRAB-E finally gets some equipment to match his moniker.
Update 2010-02-04: Uploaded new primary image.
Still building, but here is GRAB-E. So-named because of the WALL-E style track configuration and the fact that I will build my first gripper for this bot.
You can also view the build blog for this bot.
I added a video showing GRAB-E's manueverability.
GRAB-E was originally somewhat of a distraction from my more complex plans for the Mr. Basic Challenge 2, which never really got finished (but will, someday!). I was up at 4 AM and I needed to do something fun that didn't involve load fabrication noises from the basement.
CHASSIS
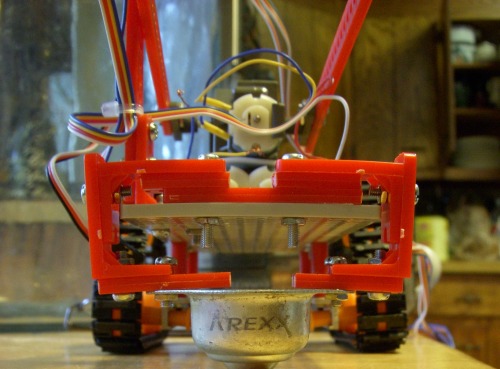
Based on a Tamiya Remote Control Robot Construction Set. I sacraficed my earlier (incredibly lame) robot for this one. I've reconfigured the tracks from the original to a triangular set up with the drive sprocket at the top and two idlers below. You can see the track setup in the main picture.
Dragging behind an Arexx roller wheel purchased from DAGU. This rear wheel works great, but definitely limits GRAB-E to an indoor, smooth floor environment. I'd be interested to hear ideas on a different approach that would let me take better advantage of the tracks and open this bot up for a greater variety of terrain.
The advantage of this set up is manuverability. The shorter track length makes turning easier.
BRAINS
Originally I sacraficed the brains from my Start Here Robot. Those brains eventually when to Robot Leader, and I have nowI built a new set of brains based on the Picaxe-40x2 loaded on the Picaxe-40/28 protoboard. Stacked beneath the protoboard is a DAGU Mr Basic motor controller board. The open space on that board has power regulation, a power switch, servo interfaces, etc.
SENSORS
I added an SRF05 sweeping ultrasonic range finder using a home-made pan-tilt based on the DAGU sensor brackets.
GRABBER
I finally built the grabber from which the bot gets his name. It is based on a single servo, with a plastic gear mounted where the servo horn should be. The gear is coupled with an orange piece of plastic that is actually a throw-away bit from a Canon ink cartridge. the driven gear is meshed with an identical one (also mounted to an orange claw bit). The second gear/claw is held on with a simple metal frame I banged together and hot glued to the servo. I hope to improve this setup later.
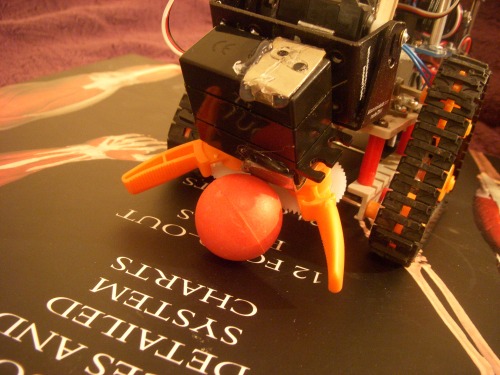
The whole mess is in turn hot glued to another DAGU sensor mount forming GRAB-E's wrist. I modified a DAGU sensor mount to work as the up/down control for the grabber arm. Check the build blog for more info on the sensor mount mod.
Later I may add pressure and position sensors so GRAB-E can be more precise. For now, I'm happy I have a decent mechanical design that lets him grab stuff.
More coming soon!
Wanders around and grabs your stuff
- Actuators / output devices: Tamiya dual gearbox, 18g servo
- Control method: automomous
- CPU: Picaxe 28x1
- Operating system: Picaxe basic
- Power source: 4 AA cells
- Sensors / input devices: none yet
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/grab-e

