

This robot is pretty harmless though I'm glad the knife wasn't on it when it fell. This is a little more robotish version of my first goosestepping robot; it has an Sr04 ultrasonic sensor, a little directional ability with a modified servo for 360 degrees, Arduino Uno, and two servos to provide walking movement. The knife is really just a counterweight without which the robot would not move. Another servo opens and closes the leg(s).
Made the robot frame from cardboard and hotglue. A ridiculous use of robot parts but was fun to do. I do have plans for version 3 by replacing the counterweight mechanism with something else.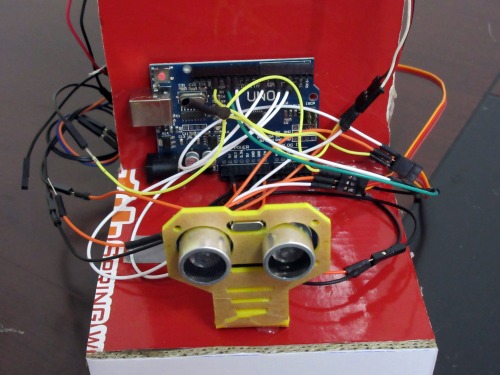
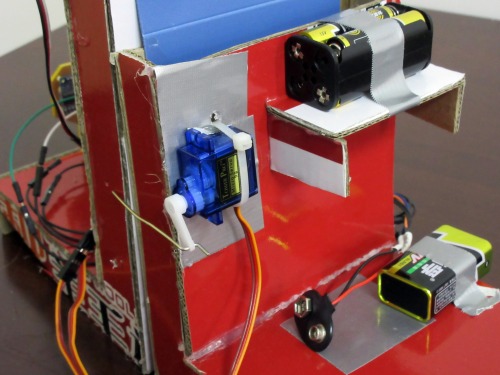
I made a little bracket to hold the battery pack up high so that the servo would not
have to work hard to open and close the legs.
 I
I
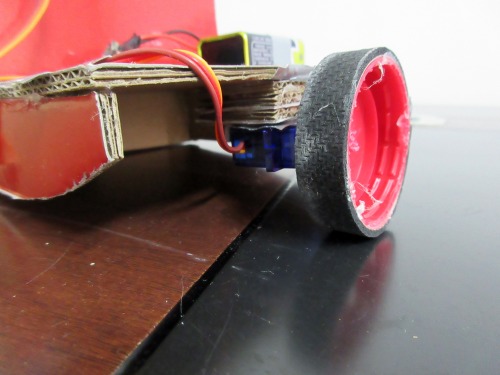
I'm pretty proud of the wheel, a bottle cap with some mousepad for tread. Also it was the first
time I modified a servo for 360 degree rotation and it came off nicely.
walks and avoids and threatens a little
- Control method: Arduino UNO
- Power source: 4 AAA
- Sensors / input devices: HC-SR04 ultrasonic sensor
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/goosestepping-robot-version-2
