

Going Whole HOG (or GWH) is my first foray into building a Hemispherical Omnidirectional Gimbal drive type robot/RC device. I first encountered the HOG drive right here on LMR, I saw aggrav8d's post about it (https://www.robotshop.com/letsmakerobots/node/36229) and got interested. I had a brushless outrunner left over from my quadcopter build, and a few servos laying around, so I thought I would give it a shot. If you have a look at the link to more information link, you can see a cupple pictures of the build process, and how I got the hemisphere mounted to the motor. The results of the whole build are a bit mixed, on one hand it goes REALLY fast (therotecal top speed is somewhere over 150 Km/h, probably not quite acceivable, but still, even if I get half that...) and it's agility is phenomonal. On the other hand, the robot, being made from lego, and not with a super sturdy frame sometimes suffers from breaking apart if I hit anything with it. It accomplished it's main goal of being a proof of concept, with sort of an unusual steering method. I have one gimbal mounted strait onto the frame to accomplish forward/reverse motion, and the front wheels move up and down reletave to the body causing the whole robot to tilt, and thus changing the angle the hemisphere meets the ground, causing it to steer. I chose to implement this hybrid method of steering so that I could get almost a full 180 degrees of motion on the rear gimbal to give it as much speed as it can possibly muster. here are some pictures of the final build:
I orriginally designed it to run with the HOG in the front and the wheels in the rear, but I found that the excessive speed of the motor caused the robot to skip and not accelerate effectively, so I just swiched the controls and made the wheels the front.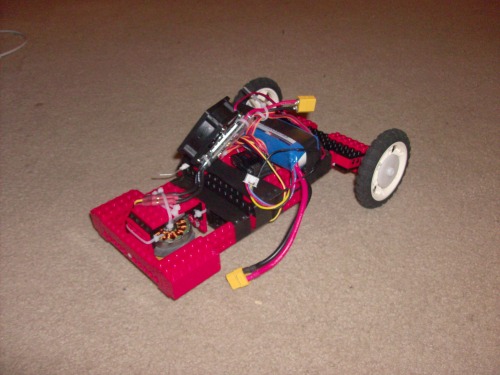
The fan mounted on the ESC was due to it getting a little hotter than I was comfortable with, these ESCs are designed to be mounted in direct airflow on airplanes or helicopters, and without the fan it was getting a bit hot. It is simply a small fan ripped from a dead inverter, wired strait to the ballence connector on the LIPO pack, and zip-tied to the ESC.

I should also note that the red bricks you see in the corners of the robot and inbetween the front axel are the lego 'Lead bricks" that I added after the robot was complete, on the front in an attempt to give the HOG a bit more traction to avoid the afforementioned skipping of the wheel, and on the back to prevent the wheels from lifting up when turning (see the videos, I was driving at really low speed, because it was such a small space, but I think I managed to get a wheel lift in there somewhere)

You can also see the smily face is getting rubbed off the hemisphere. what you cannot see is the flat spot that is developing on the very point of the ball from being spun at a very high RPM when the bot is just sitting there.
I do not think I will be doing a whole lot more with this particular guy, but I plan to make the front gimbal a bit more sturdy (bent aluminum) and build another robot around it. I hope to make that one an actual robot, and experiment with some high speed processers and sensors, and push the limits, speed-wise of small hobby robots and processers.
Goes insanely fast for it's size.
- Actuators / output devices: 2 servos, 1 750 kv brushless outrunner
- Control method: 2.4 GHz tx/rx
- Power source: 11.1 volt 3 cell LIPO
- Sensors / input devices: none at the moment
- Target environment: Smooth floors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/going-whole-hog