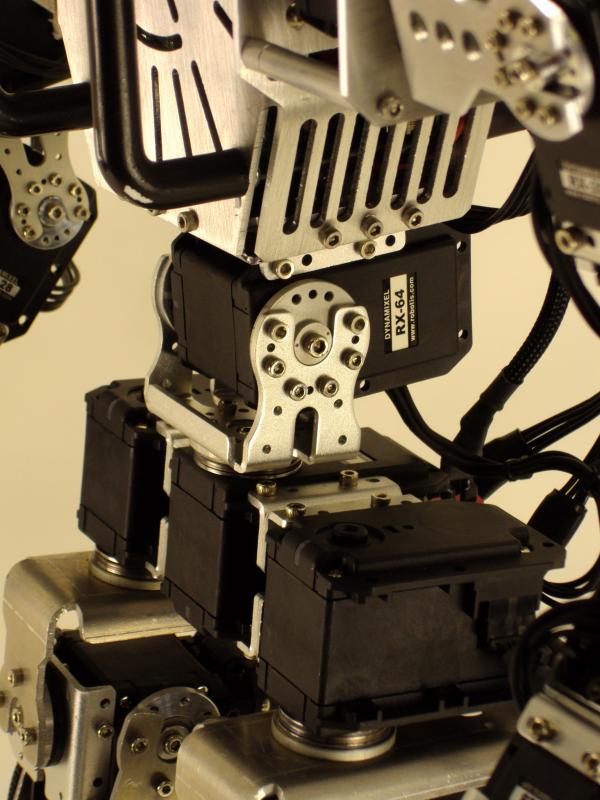
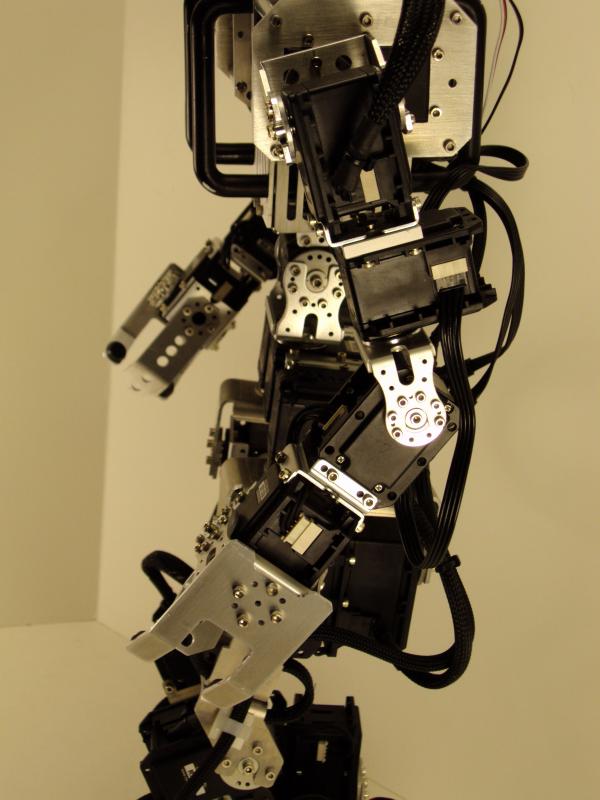
First post here but figured I would share my most recent work; an EX-106+ servo based custom humanoid robot named Giger. This bot was designed in Autodesk Inventor, and machined from 5052 alloy aircraft aluminum using a Sherline 2000 CNC and some work from Rapid Sheet Metal. He stands 62cm tall, weighs about 5kg and uses a total of 10x EX-106+, 6x RX-64s, and 8x RX-28s. Video shown is rough initial progress, walking gait still needs a lot of work and the IMU data needs to be integrated for dynamic balancing.
To everyone: Giger’s stats may be impressive, but it is even more impressive to see in person. It must be about 60cm tall and looks like it could crush those puny Robonova kung-fu fighters with a single blow.
Its the actuators. A Its the actuators. A bundle of 10 is well over $2,000. It could probably have been done with like, $10 actuators, but I don’t know really. I think I’ll try to build a cheap version of this around Christmas time just to see.
WOW 1000 oz-in??? I just found a bundle of 8 servos for a bargain- 34 bucks flat. But… they’re 17.5 oz-in haha! Whatever, I’m still going to try to make a mini-one like this. Its inspiring
Also, I have Autodesk Inventor from my school. Hm…
That thing dont got a prayer against my work in progress (aka dream). 90 cm tall! Beautiful job, I would like to know your walking program for mine. Just a few questions…
Double-servos. do they have 2 horns or one? Can I have a Link?
Torque per cm, and length of the legs…please.
weight of finished robot
Sensors…any plans for autonomous?
Can I have the cad files emailed to [email protected]? I need to see some of those joints for my own project…
Thanks for posting your very impressive bot here. It is inspiring. There’s a lot to be learned from this bot, even if you don’t plan on spending $300 for a servo that can supply so much torque.
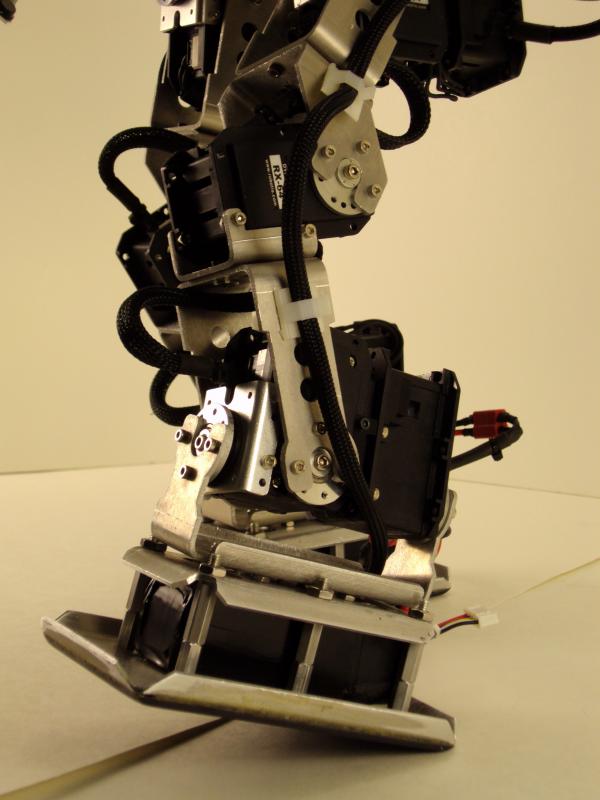
For example, the picture at the bottom of your post shows a simple and elegant approach to creating a gripper. Great design!
I’m thinking about a two piece aluminium frame that could be attached to a standard servo. The servos on this bot have actuators on both sides, but we can work around that for a standard servo.
If you imagine the servo laying on its side with the round servo horn attached and positioned on the left.
Part One of the frame goes underneath the servo with a little overlap on the left for attaching it, and completely covering the right side of the servo. This forms the fixed part of the gripper. The right side of Part One also includes a round shaft that will be used to mount and pivot Part Two. This pivot shaft is directly inline with the shaft of the servo’s actuator.
Part Two is the movable part of the gripper. It is attached to the servo horn on the left, goes up above the top of the servo (recall the servo is on its side), and down the right side, with a hole that slips over the pivot from Part One.
Suitable “fingers” are attached to Part One and Part Two, or they are integral to the part, depending on how you fabricate this. A picture would be helpful, I know. I don’t have time to make one this morning. Maybe later.
Most EXCELLENT robot - as your robots usually are! I’ve seen your bots over on the Trossen Robotics forums (I just lurk there sometimes). Yours are some of the most awesome real-world robots I have ever seen. Anyway, I most certainly want to welcome you to the membership here!